2005-11-16 Jeff Anderson Fixed bug in SetGround not setting the proper boolean return value
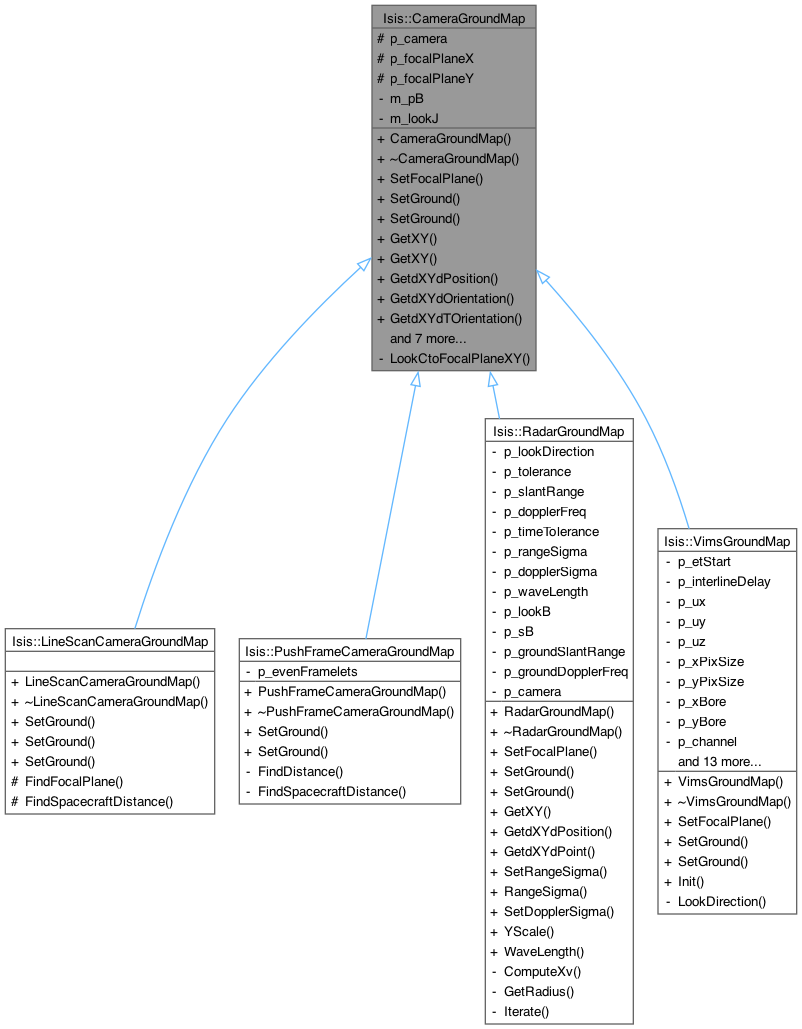
2007-06-11 Debbie A. Cook - Added overloaded method SetGround that includes a radius argument and the method LookCtoFocalPlaneXY() to handle the common functionality between the SetGround methods
2008-07-14 Steven Lambright Added NaifStatus calls
2009-10-14 Debbie A. Cook Added new virtual method GetXY(lat,lon,radius, lookJ)
2009-11-27 Debbie A. Cook Modified virtual method GetXY(lat,lon,radius,lookJ,cudx,cudy)
2010-03-19 Debbie A. Cook Modified virtual method to return cudx and cudy; added methods GetdXYdPosition, GetdXYdOrientation, GetdXYdPoint, PointPartial, and DQuotient; and added members PartialType (from BundleAdjust) and p_lookJ.
2010-08-05 Debbie A. Cook Added another version of GetXY to support changes from binary control net upgrade
2010-11-22 Debbie A. Cook Moved PointPartial call out of GetdXYdPoint to allow BundleAdjust to avoid multiple calls for every measure. The application must call PointPartial to get the body-fixed look vector derivative prior to calling this method.
2011-02-09 Steven Lambright SetGround now uses the Latitude, Longitude and SurfacePoint classes.
2011-03-18 Debbie A. Cook Added reference to surface point in GetXY
2012-07-06 Debbie A. Cook Updated Spice members to be more compliant with Isis coding standards. References #972.
2012-10-10 Debbie A. Cook Modified to use new Target class. References Mantis ticket #775 and #1114.
2013-02-22 Debbie A. Cook Fixed LookCtoFocalPlaneXY method to properly handle instruments with a look direction along the negative z axis. Fixes Mantis ticket #1524
2014-04-17 Jeannie Backer - Replaced local variable names with more descriptive names. References #1659.
2015-07-24 Debbie A. Cook - Added new methods GetdXYdTOrientation(), EllipsoidPartial() and MeanRadiusPartial() along with new member p_pB. References Mantis ticket TBD.
2016-06-27 Ian Humphrey - Updated documentation and coding standards. Fixes #3971.
2017-08-30 Summer Stapleton - Updated documentation. References #4807.
2019-04-15 Debbie A. Cook - Added optional bool argument to main GetXY method to allow the bundle adjustment to skip the back of planet test during iterations. Also changed the name of the angle variable to cosangle to be more descriptive. References #2591.
2018-07-26 Kris Becker - Move all local variables and methods to protected scope so derived objects can be developed properly