|
| | LineScanCameraGroundMap (Camera *cam) |
| | Constructor.
|
| |
| virtual | ~LineScanCameraGroundMap () |
| | Destructor.
|
| |
| virtual bool | SetGround (const Latitude &lat, const Longitude &lon) |
| | Compute undistorted focal plane coordinate from ground position.
|
| |
| virtual bool | SetGround (const SurfacePoint &surfacePoint) |
| | Compute undistorted focal plane coordinate from ground position.
|
| |
| virtual bool | SetGround (const SurfacePoint &surfacePoint, const int &approxLine) |
| | Compute undistorted focal plane coordinate from ground position.
|
| |
| virtual bool | SetFocalPlane (const double ux, const double uy, const double uz) |
| | Compute ground position from focal plane coordinate.
|
| |
| virtual bool | GetXY (const SurfacePoint &spoint, double *cudx, double *cudy, bool test=true) |
| | Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call.
|
| |
| virtual bool | GetXY (const double lat, const double lon, const double radius, double *cudx, double *cudy) |
| | Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call.
|
| |
| virtual bool | GetdXYdPosition (const SpicePosition::PartialType varType, int coefIndex, double *cudx, double *cudy) |
| | Compute derivative w/r to position of focal plane coordinate from ground position using current Spice from SetImage call.
|
| |
| virtual bool | GetdXYdOrientation (const SpiceRotation::PartialType varType, int coefIndex, double *cudx, double *cudy) |
| | Compute derivative of focal plane coordinate w/r to instrument using current state from SetImage call.
|
| |
| virtual bool | GetdXYdTOrientation (const SpiceRotation::PartialType varType, int coefIndex, double *cudx, double *cudy) |
| | Compute derivative of focal plane coordinate w/r to target body using current state.
|
| |
| virtual bool | GetdXYdPoint (std::vector< double > d_pB, double *dx, double *dy) |
| | Compute derivative of focal plane coordinate w/r to ground point using current state.
|
| |
| std::vector< double > | PointPartial (SurfacePoint spoint, PartialType wrt) |
| | Compute derivative with respect to indicated variable of conversion function from lat/lon/rad to rectangular coord.
|
| |
| std::vector< double > | EllipsoidPartial (SurfacePoint spoint, PartialType raxis) |
| | Compute derivative of focal plane coordinate w/r to one of the ellipsoidal radii (a, b, or c)
|
| |
| std::vector< double > | MeanRadiusPartial (SurfacePoint spoint, Distance meanRadius) |
| | Compute derivative of focal plane coordinate w/r to mean of the ellipsoidal radii (a, b, c)
|
| |
| double | DQuotient (std::vector< double > &look, std::vector< double > &dlook, int index) |
| | Convenience method for quotient rule applied to look vector.
|
| |
| double | FocalPlaneX () const |
| |
| double | FocalPlaneY () const |
| |
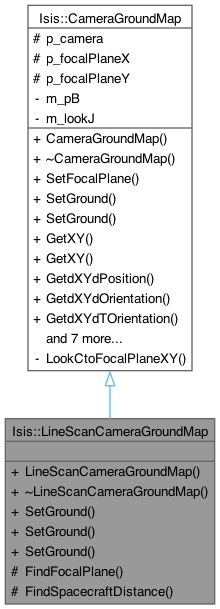
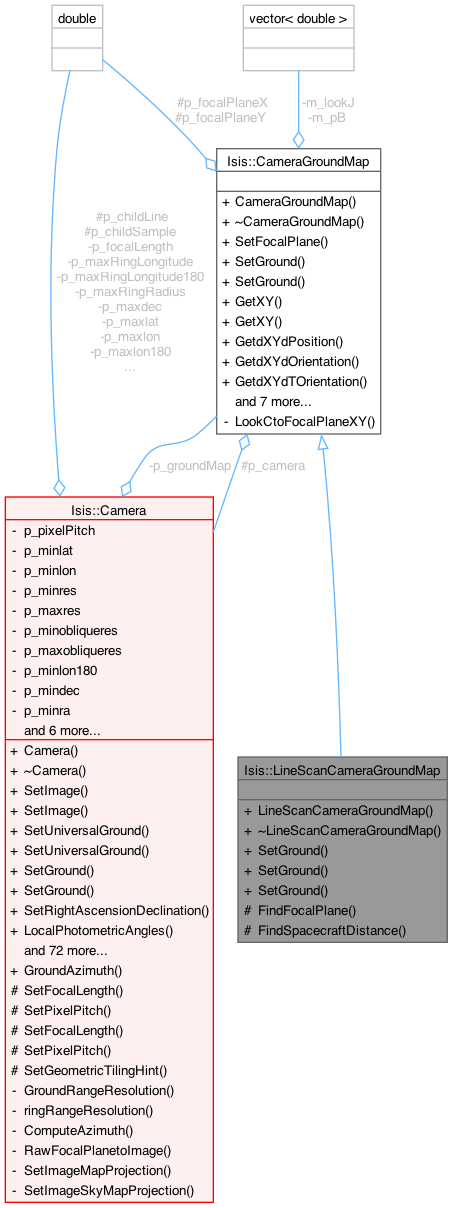
Convert between undistorted focal plane and ground coordinates.
This class is used to convert between undistorted focal plane coordinates (x/y) in millimeters and ground coordinates lat/lon for line scan cameras.
- See also
- Camera
- Author
- 2005-02-08 Jeff Anderson
- History
2005-02-08 Jeff Anderson - Original version
2005-08-24 Jeff Anderson - Fixed bug when algorithm was checking for the backside of the planet and convergence failed (checkHidden)
2005-11-16 Jeff Anderson - Fixed bug when a image covers more than 180 degrees in an orbit which would cause two focal plane roots to be inside the start/end time range.
2007-12-21 Debbie A. Cook - Added overloaded method SetGround that includes a radius argument
2009-03-02 Steven Lambright - Added an additional method of finding the point in SetGround(...) if the original algorithm fails. The spacecraft position at the beginning and end of the image are now being used to estimate the correct line if the bounding check fails the first time through.
2010-06-17 Steven Lambright - More tolerant of failures in the distortion models for finding the bounds of the search in FindSpacecraftDistance
2010-12-07 Steven Lambright - SetGround(double,double) now goes straight to the radius instead of using SetUniversalGround to get the radius.
2012-07-06 Debbie A. Cook, Updated Spice members to be more compliant with Isis coding standards. References #972.
Definition at line 49 of file LineScanCameraGroundMap.h.
| double Isis::CameraGroundMap::DQuotient |
( |
std::vector< double > & | look, |
|
|
std::vector< double > & | dlook, |
|
|
int | index ) |
|
inherited |
Convenience method for quotient rule applied to look vector.
This method will compute the derivative of the following function (coordinate x or y) / (coordinate z)
- Parameters
-
| look | look vector in camera frame |
| dlook | derivative of look vector in camera frame |
| index | vector value to differentiate |
- Returns
- double derivative Computed derivative
Definition at line 550 of file CameraGroundMap.cpp.
Referenced by GetdXYdOrientation(), GetdXYdPoint(), GetdXYdPosition(), and GetdXYdTOrientation().
| bool Isis::CameraGroundMap::GetdXYdOrientation |
( |
const SpiceRotation::PartialType | varType, |
|
|
int | coefIndex, |
|
|
double * | dx, |
|
|
double * | dy ) |
|
virtualinherited |
| bool Isis::CameraGroundMap::GetdXYdPoint |
( |
std::vector< double > | d_pB, |
|
|
double * | dx, |
|
|
double * | dy ) |
|
virtualinherited |
| bool Isis::CameraGroundMap::GetdXYdPosition |
( |
const SpicePosition::PartialType | varType, |
|
|
int | coefIndex, |
|
|
double * | dx, |
|
|
double * | dy ) |
|
virtualinherited |
| bool Isis::CameraGroundMap::GetdXYdTOrientation |
( |
const SpiceRotation::PartialType | varType, |
|
|
int | coefIndex, |
|
|
double * | dx, |
|
|
double * | dy ) |
|
virtualinherited |
| bool Isis::CameraGroundMap::GetXY |
( |
const double | lat, |
|
|
const double | lon, |
|
|
const double | radius, |
|
|
double * | cudx, |
|
|
double * | cudy ) |
|
virtualinherited |
Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call.
This method will compute the undistorted focal plane coordinate for a ground position, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/m_pB/x/y. The class value for m_lookJ is set by this method.
- Parameters
-
| lat | Latitude in degrees |
| lon | Longitude in degrees |
| radius | Radius in meters |
| cudx | [out] Pointer to computed undistored x focal plane coordinate |
| cudy | [out] Pointer to computed undistored y focal plane coordinate |
- Returns
- bool If conversion was successful
- See also
- the application socetlinescankeywords
Definition at line 254 of file CameraGroundMap.cpp.
References Isis::Angle::Degrees, GetXY(), and Isis::Distance::Meters.
| bool Isis::CameraGroundMap::GetXY |
( |
const SurfacePoint & | point, |
|
|
double * | cudx, |
|
|
double * | cudy, |
|
|
bool | test = true ) |
|
virtualinherited |
Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call.
This method will compute the undistorted focal plane coordinate for a ground position, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/m_pB/x/y. The class value for m_lookJ is set by this method.
- Parameters
-
| point | Surface point (ground position) |
| cudx | [out] Pointer to computed undistorted x focal plane coordinate |
| cudy | [out] Pointer to computed undistorted y focal plane coordinate |
| test | Optional parameter to indicate whether to do the back-of-planet test. |
- Returns
- bool If conversion was successful
Reimplemented in Isis::RadarGroundMap.
Definition at line 152 of file CameraGroundMap.cpp.
References Isis::SpiceRotation::J2000Vector(), Isis::Displacement::kilometers(), m_lookJ, m_pB, p_camera, Isis::PI, and Isis::SpiceRotation::ReferenceVector().
Referenced by Isis::BundleAdjust::computePartials(), Isis::ControlPoint::ComputeResiduals(), Isis::ControlPoint::ComputeResiduals_Millimeters(), Isis::IsisBundleObservation::computeRHSPartials(), GetXY(), and Isis::IrregularBodyCameraGroundMap::GetXY().
| vector< double > Isis::CameraGroundMap::MeanRadiusPartial |
( |
SurfacePoint | spoint, |
|
|
Distance | meanRadius ) |
|
inherited |
Compute derivative of focal plane coordinate w/r to mean of the ellipsoidal radii (a, b, c)
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to the mean of the a (major axis), b (minor axis), and c (polar axis) radius, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
- Parameters
-
| spoint | Surface point whose derivative is to be evalutated |
| meanRadius | Computed mean of radii |
- Returns
- vector<double> partialDerivative of body-fixed point with respect to mean radius TODO This method assumes the radii of all points in the adjustment have been set identically to the ???
Definition at line 486 of file CameraGroundMap.cpp.
References Isis::Displacement::kilometers(), and Isis::Distance::kilometers().
Referenced by Isis::IsisBundleObservation::computeTargetPartials().
| bool Isis::CameraGroundMap::SetFocalPlane |
( |
const double | ux, |
|
|
const double | uy, |
|
|
const double | uz ) |
|
virtualinherited |
Compute ground position from focal plane coordinate.
This method will compute the ground position given an undistorted focal plane coordinate. Note that the latitude/longitude value can be obtained from the camera pointer passed into the constructor.
- Parameters
-
| ux | undistorted focal plane x in millimeters |
| uy | undistorted focal plane y in millimeters |
| uz | undistorted focal plane z in millimeters |
- Returns
- bool If conversion was successful
Reimplemented in Isis::RadarGroundMap, and Isis::VimsGroundMap.
Definition at line 50 of file CameraGroundMap.cpp.
References Isis::NaifStatus::CheckErrors(), and p_camera.