Apply a spatial high pass filter to a cube (divide)
Overview
Parameters
Example 1
Description
This program divides the pixel being processed by a low pass filter.
This has the general effect of highlighting the edges of grouped
contrasted DN values in the image, and therefore, feature changes will be
emphasized. Predominant changes will be emphasized with larger boxcars,
and smaller changes can be searched for using smaller boxcars.
This is done by convolving an NxM boxcar through the data, where
N and M are odd integers. In other words, the average DN value of the
boxcar is divided into its middle pixel DN value. Please refer to the
following diagram:
Thus, P(output) = P(input) / lowPassFilter, or P(s,l) = P(s,l) /
average(s,l,N,M) where P is the target pixel, s and l are the sample and
line position in the boxcar, N and M are the size of the boxcar (in this
case 3x3) and average(s,l,N,M) is the average of the NxM centered box.
For details on the box filtering see the following references:
M. J. McDonnell, Box-Filtering Techniques, Computer Graphics
and Image Processing, Vol. 17, 1981, pages 65-70
E. M. Eliason and L. A. Soderblom, An Array Processing System
for Lunar Geochemical and Geophysical Data,
Porc. Lunar Sci. Conf. (8th) , 1977, pages 1163-1170.
This is the total number of samples in the boxcar.
It must be odd and can not exceed twice the number of samples
in the cube. In general, due to the computational algorithm,
the size of the boxcar does not cause the program to operate
significantly slower. (See Eliason/Soderblom document)
This is the total number of lines in the boxcar.
It must be odd and can not exceed twice the number of lines
in the cube. In general, due to the computational algorithm,
the size of the boxcar does not cause the program to operate
significantly slower. (See Eliason/Soderblom document)
Valid minimum pixel value that will be used in boxcar computation. If
a pixel value is less than LOW then it will not be used when
computing boxcar statistics.
Valid maximum pixel value that will be used in boxcar computation. If
a pixel value is greater than HIGH then it will not be used when
computing boxcar statistics.
This is the minimum number of valid pixels which must occur inside the
NxM boxcar for filtering to occur. For example, 3x5 boxcar has 15 pixels
inside. If MINIMUM=10 then the filter will occur if there are 10 or
greater valid pixels. A valid pixel is one that is not special (NULL, LIS,
etc) and is in the range defined by LOW to HIGH.
This option is used to define how special pixels are handled. If the
center pixel of the boxcar(input) is a special pixel, the output pixel
will contain the same special pixel, or set to NULL depending on the
value of this parameter.
Screenshot of GUI with parameters filled in to perform a divide filter of the input image with a boxcar of 101x101.
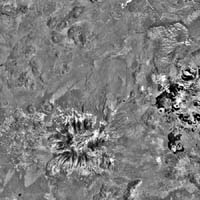
Input Image
Input image
Input image for divfilter
Parameter Name:
FROM
This is the input image for the divfilter example.
Output Image
Output image showing results of the divfilter application.
Output image for divfilter
Parameter Name:
TO
This is the output image for this example of divfilter. It is the same as running lowpass and dividing the input image by the lowpass output using the ratio application.