ISIS Application Documentation
findfeatures | Printer Friendly View | TOC | Home |
Feature-based matching algorithms used to create ISIS control networks
| Overview | Parameters | Example 1 | Example 2 | Example 3 | Example 4 |
DescriptionIntroductionfindfeatures was developed to provide an alternative approach to create image-based ISIS control point networks. Traditional ISIS control networks are typically created using equally spaced grids and area-based image matching (ABM) techniques. Control points are at the center of these grids and they are not necessarily associated with any particular feature or interest point. findfeatures applies feature-based matching (FBM) algorithms using the full suite of OpenCV detection and descriptor extraction algorithms and descriptor matchers. The points detected by these algorithms are associated with surface features identified by the type of detector algorithm designed to represent certain characteristics. Feature based matching has a twenty year history in computer vision and continues to benefit from improvements and advancements to make development of applications like this possible. This application offers alternatives to traditional image matching options such as autoseed, seedgrid and coreg. Applications like coreg and pointreg are area-based matching, whereas findfeatures utilizes feature-based matching techniques. The OpenCV feature matching framework is used extensively in this application to implement the concepts commonly found in robust feature matching algorithms and applied to overlapping single pairs or multiple overlapping image sets. Overviewfindfeatures uses OpenCV's FBM algorithms to match a single image, or set of images, called the trainer image(s) (FROM/FROMLIST) to a different image, called the query image (MATCH). Feature based algorithms are comprised of three basic processes: detection of features (or keypoints), extraction of feature descriptors and finally matching of feature descriptors from two image sources. To improve the quality of matches, findfeatures applies a fourth process - robust outlier detection. Feature detection is the search for features of interest (or key points) in an image. The ultimate goal is to find features that can also be found in another image of the same object or location. Feature detection algorithms are often refered to as detectors. Detectors describe key points based on their location in a specific image. Feature descriptors allow features found by a detector to be described outside of the context of that image. For example, features could be described by their roundness or how much they contrast the surrounding area. Feature descriptors provide a way to compare key points from different images. Algorithms that extract feature descriptors from keypoints in an image are called extractors. The third process is to match key points from different images based on their feature descriptors. The trainer images can be matched to the query image (called a trainer to query match) or the query image can be matched to the trainer images (called a query to trainer match). findfeatures performs both a trainer to query match and a query to trainer match. Algorithms for matching feature descriptors are called matchers. The final step is to remove outlier matches. This helps improve the quality and accuracy of matches when conditions make matching challenging. findfeatures uses a four step outlier removal process. At each step, matches are rejected and only the surviving matches are used in the following step.
Matches that survive the outlier rejection process are converted into an output control network. From here, multiple control networks created by systematic use of findfeatures can be combined into one regional or global control network with cnetcombinept. This can result in extremely large control networks. cnetthinner can be used to reduce the size of the network while maintaining sufficient distribution for use with the jigsaw application. If the control network is going to be used to create a DEM, then it should not be thinned. Supported Image Formatsfindfeatures is designed to support many different image formats. However, ISIS cubes with camera models provide the greatest flexibility when using this feature matcher. ISIS cubes with geometry can be effectively and efficiently matched by applying fast geometric transforms that project all overlapping candidate images (referred to as train images in OpenCV terminolgy) to the camera space of the match (or truth) image (referred to as the query image in OpenCV terminology). This single feature allows users to apply virtually all OpenCV detector and extractor, including algorithms that are not scale and rotation invariant. Other popular image formats are supported using OpenCV imread() image reader API. Images supported here can be provided as the image input files. However, these images will not have geometric functionality so support for the fast geometric option is not available to these images. As a consequence, FBM algorithms that are not scale and rotation invarant are not recommended for these images unless they are relatively spatially consistent. Nor can the point geometries be provided - only line/sample correlations will be computed in these cases. Note that all images are converted to 8-bit when read in. Specifications for Robust Feature Matching Algorithms
Robust matcher algorithms consist of detectors, extractors, and
matchers components and their parameters and are selected by a
specification string provided in the ALGORITHM parameter.
More that one matcher algorithm configuration can be provided in
a file, one algorithm per line, specified in the ALGOSPECFILE
parameter. The basic scheme is shown below (optional portions are
enclosed by
detector[@param1:value1@...]/extractor[@param1:value@...][/matcher@param1:value1@...][/parameters@param1:value1@...]
An alternative scheme for the specification string allows the
components to be in any order. Each component is formatted the same,
except the first entry in the detector, extractor, and (if specified)
matcher components begin with
extractor.LATCH@Bytes:16@HalfSSDSize:4/parameters@RootSift:true/matcher.FlannBasedMatcher/detector.FAST@Threshold:9@NonmaxSuppression:false
matcher.BFMatcher@NormType:Norm_L1/feature2d.SIFT@NOctaveLayers:4.
Multiple sets of FBM algorithms and robust matcher parameters can be entered via the ALGOSPECFILE parameter. It takes a text file (*.lis) with a specification on each line. For each specification, a separate set of FBM algorithms and robust matcher parameters will be created. Each set will be used to match the input images and the set that produces the best matches will be used to create the output control network. When the DEBUG and/or DEBUGLOG parameters are used, the results from each set along with the quality of the match will be output. Each algorithm has default parameters that are suited for most uses. The LISTALL parameter will list every supported detector, extractor, and matcher algorithm along with its parameters and default values. The LISTSPEC parameter will output the results of the parsed specification string(s). A description of every algorithm supported by findfeatures and if they can be used as a detector, extractor, and/or matcher can be found in the Algorithms table. Descriptions of the robust matcher parameters and their default values can be found in the Robust Matcher Parameters table. Choosing Feature Matching AlgorithmsChoosing effective algorithms and parameters is critical to successful use of findfeatures. If a poor choice of algorithms and/or parameters is made, findfeatures will usually complete, but excessive computation time and/or poor quality control network will result. findfeatures supports all of the OpenCV detectors, extractors, and matchers. Some algorithms work well in a wide range of scenarios (BRISK and SIFT are both well tested and very robust), while others are highly specialized. The following section provides guidelines to determine which algorithms and parameters to use. findfeatures gives users a wide range of options to alter algorithms functionaility. Such a broad range of choices/combinations can be intimidating for users who are unfamiliar with FBM. The following are some suggestions to help make reasonable decision. First, when in doubt, trust the defaults. The defaults in findfeatures are designed to be a reasonable choice for a wide range of conditions. They may not be suitable for every situation but special configurations are usually not required to produce acceptable results. Defaults for the detector and extractor algorithms are not provided, but the SIFT algorithm is a very general, scale and rotation invariant, robust algorithm that can produce high quality control networks for most situations. The majority of more modern algorithms are focused on speed and efficiency. If at all possible, always use the FASTGEOM parameter. The majority of problems when using FBM arise when trainer and query images have inconsistent spatial geometry and/or significant variations in observing conditions during image acquisition. The FASTGEOM parameter helps minimize these challenges by using a priori ephemeris SPICE data to create and apply a perspective matrix warp projection using the query and training geometry. Combining the FASTGEOM option with algorithms that are designed for speed (the FAST descriptor and BRIEF extractor are reasonable options) will quickly produce a control network. Keep in mind these networks are whole-pixel accuracy and will likely require refinement to subpixel accuracy with pointreg prior to bundle adjustment with jigsaw. Different detectors search for different types of features. For example, the FAST algorithm searches for corners, while blob detection algorithms search for regions that contrast their surroundings. When choosing which detector to use, consider the prominent features in the image set. The FAST algorithm would work well for finding key points on a linear feature, while a blob detection algorithm would work well for finding key points in nadir images of a heavily cratered area. When choosing an extractor there are two things to consider: the invariance of the extractor and the size of the extracted descriptor. Different extractors are invariant (i.e, not adversely affected) to different transformations. For example, the SIFT algorithm uses descriptors that are invariant to rotation, while BRIEF feature descriptors are best for images that are spatially similar in orientation. In general, invariance to more transformations comes at a cost, bigger descriptors. Detectors often find a very large number of key points in each image. The amount of time it takes to extract and then compare (i.e., match) the resultant feature descriptors heavily depends upon the size of the descriptor. So, more invariance usually means longer computation times. For example, using the BRIEF extractor (which extracts very small feature descriptors) instead of the SIFT extractor (which has moderately sized feature descriptors) provides an order of magnitude speed increases for both extraction and matching. If your images are from similar sensors and under similar conditions, then an extractor that uses smaller descriptors (BRISK, BRIEF, etc.) will be faster and just as accurate as extractors that use larger, more robust descriptors (SIFT, etc.). If your images are from very different sensors (a line scanner matched to a highly distorted framing camera, a low resolution framing camera and a high resolution push broom camera, etc...) or under very different conditions (very oblique and nadir, opposing sun angles, etc.) then using an extractor with a more robust descriptor will take longer but will be significantly more accurate than using an extractor with a smaller descriptor. findfeatures has two options for matchers: brute force matching and a FLANN based matcher. The brute force matcher attempts to match a key point with every key point in another image and then pairs it with the closest match. This ensures a good match but can take a long time for large numbers of images and key points. The FLANN based matcher trains itself to find the approximate best match. It does not ensure the same accuracy as the brute force matcher, but is significantly faster for large numbers of images and key points. By default findfeatures uses a brute force matcher with parameters automatically chosen based upon the type of extractor used. Several parameters allow for fine tuning of the outlier rejection process. The RATIO parameter determines how distinct matches must be. A ratio close to 0 will force findfeatures to consider only unambiguous matches and reject a large number of matches. If many, indistinct features are detected in each image, a low ratio will result in smaller, higher quality control networks. If few, non-distinct features are detected in each image, a high ratio will prevent the control network from being too sparse. The EPITOLERANCE and EPICONFIDENCE parameters control how outliers are found when the fundamental matrices are computed. These parameters will have the highest impact when the query and trainer images are stereo pairs. The HMGTOLERANCE parameter controls how outliers are found after the homography matrices are computed. This parameter will have the highest impact when the query and trainer images have very different exterior orientations. When using FASTGEOM, it is recommended to use higher values for these tolerances due to distortions that are introduced by image size perspective warping using the homography matrix. Prior to FBM, findfeatures can apply several transformations to the images. These transformations can help improve match quality in specific scenarios. The FASTGEOM, GEOMTYPE, and FASTGEOMPOINTS parameters allow for reprojection of the trainer images into the query image's geometry prior to FBM. (This algorithm is very similar to processing by the ISIS cam2cam application. FASTGEOM differs in that it is not as robust or accurate as cam2cam because FASTGEOM applies a single matrix to warp the entire image - cam2cam uses a rubber sheet projection which is significantly more robust and accurate but can take significantly longer to project images.) These parameters can be used to achieve the speed increases of algorithms that are not rotation and/or scale invariant (BRIEF, FAST, etc.) without loss of accuracy. These parameters require that the trainer and query images be ISIS cubes with geometry/cartography capabilites established by running the spiceinit application on all images. For rotation and scale invariant algorithms (SIFT etc.), these parameters may have very little or significant adverse effects. The FILTER parameter allows for the application of filters to the trainer and query images prior to FBM. The SOBEL option will emphasize edges in the images. The Sobel filter can introduce artifacts into some images, so the SCHARR option is also available to apply a more accurate filter. These filters allows for improved detection when using edge based detectors (FAST, AGAST, BRISK, etc...). If an edge based detector is not detecting a sufficient number of key points or the key points are not sufficienty distinct, these filters may increase the number of successful matches. The OpenCV methods used in the outlier rejection process have several options that can be set along with the algorithms. The available parameters for are robust matcher algorithms are listed in the following Robust Matcher Parameters table. Feature matching algorithms and their descriptions and references are listed in the Algorithms table. The LISTALL program option will list all available algorithms, their feature capabilities, and parameters with default values.
Customizing Feature Matching AlgorithmsThere are four options to select and customize Feature Matching algorithms and their parameters. The two findfeatures parameters that specify Feature Matching algorithms are the ALGORITHM and ALGOSPECFILE parameters. The ALGORITHM parameter accepts a string that adheres to the specifications as described above that select the detector, extractor and matcher algorithms. Parameters for each of those algorithms can be provided in the string as well. The ALGOSPECFILE parameter accepts the name of a file containing one or more Feature Matching algorithm configurations that also adhere to the specification. The ALGORITHM and ALGOSPECFILE parameters should contain the full specification of the Feature Matching algorithms, including the optional "/parameters" of the algorithm. At times, its useful to alter this component of the algorithm to customize for each set of data without having to maintain seperate files (although maintaining specs in those file is recommended practice). The findfeatures ALGORITHM "/parameters" component of the feature matching specification command line overrides the contents of the file specified in the PARAMETERS program parameter. This allows runtime specification of mainly the ALGOSPECFILE PVL-type file contents to alter behavior of this component of the feature matching algorithm. Initial values of outlier matching parameters that can be specified in the PARAMETERS program option can be found in the Robust Matcher Parameters table. Use of PARAMETERS excludes the need for these values to be specified in the command line without having to explicitly add them to the ALGORITHM string specification or ALGOSPECFILE. The findfeatures GLOBALS program option allows users to specify "/parameters" keywords that are applied in the Feature Matching algorithms (as well as FASTGEOM algorithms). Individual parameters are specifed in accordance with the ALGORITHM string specification described above. For example, users can select to have all matched files saved as PNGs by specifying "GLOBALS=SaveRenderedImages:true". This allows the most convenient method to alter or fully specify feature matching parameters at runtime without having to edit or provide any parameterization files. The order of precedence of Feature Matching parameterization is (lowest to highest) PARAMETERS, ALGOSPECFILE, ALGORITHM and finally GLOBALS. The FASTGEOM AlgorithmThe FASTGEOM option provides advanced geometric processing of training images (FROM, FROMLIST) before they are matched to the query (MATCH) image. The application of the FASTGEOM option is indicated when a wide variety of observation geometry is present in the FROM/FROMLIST images. Once applied, all OpenCV feature matching algorithms can be used particularly those that are not rotation and scale invariant. This is intended to provide a wide variety of feature matching options to users that result in better, and more comprehensive image control networks that contain more images with higher numbers of control points and higher density counts of control measures. ISIS inherently provides all the necessary cartographic capabilities that make it possible to preprocess the images to eliminate, as much as possible, scale and rotation variances in images. By using a priori geometry provided by SPICE data, findfeatures constructs transformation matrices for each trainer image that matches the geometric properties of the query image. Applying the transformation matrix to each trainer image results in a (fast) projection, or warp, of the image into the image space of the query image, thus minimizing scale and rotation invariance. This defines the FASTGEOM processing objectives in findfeatures. Note that translation, or spatial offsets, may likely exist between images due to the inherent nature of a priori ephemeris data. This option is known to have problems with image sets of irregular bodies, especially for images acquired along the long axis of the target body.. The FASTGEOM algorithms requires all input images to have ISIS-based SPICE ephemeris applied by the spiceinit application. If any image does not have SPICE or no common latitude/longitude coordinates can be determined between the trainer image and the query image, they are exclude from feature matching and will be recorded in the TONOGEOM file. Feature matching will continue if one or more trainer image is successfully transformed. Effective Use of FASTGEOM AlgorithmsThe FASTGEOM option provides two different algorithms - grid and radial - that can be used to associate common latitude/longitude coordinates between two images. These common latitude/longitude coordinates are translated to line/sample image coordinates in both images which are then used to create a homography 3x3 transformation matrix mapping the trainer line/sample coordinate pairs into the cooresponding query line/sample image coordinates. After the trainer images are read in, the homography transformation matrix is applied using a perspective warp projection of the trainer image. The GEOMTYPE parameter determines the type of output image is produced from the projection. This produces the projected trainer image that will be matched to the query image. The query image is not modified in this process. Several common parameters govern behavior of both the grid and radial FASTGEOM algorithms. Note each algorithm is applied independently to every query/trainer image pair. For each image pair, the values used/computed and the resulting homography matrix are logged in the DEBUGLOG file (when DEBUG=true). The algorithm parameters are described in the following table.
FASTGEOM Grid AlgorithmThe FASTGEOM Grid algorithm computes a coreg-like rectangular set of grid points that are evenly space in each image axis. This algorithm will continue to refine the grid by decreasing the spacing between each iteration until at least FastGeomPoints valid mapping points are found. The algorithm continues to refine the spacing until every pixel in the query image is check for a valid mapping coordinate into the trainer image. Therein lies the potential for this algorithm to consume massive time and compute resources for images that contain very few or no valid common geometric points between query and trainer images. Therefore, some parameters are provided that place constraints/boundaries on the variables of this algorithm. These parameters are described in the following table.
This algorithm works best for high resolution images where there are little or no discontinuities in geometry and no limbs. It also can result in excessively long run times and/or significant computed resources for approach images where valid geometry is only in a small localized region in the image FOV. In those cases, the FASTGEOM radial algorithm is recommended. FASTGEOM Radial AlgorithmThe FASTGEOM Radial algorithm computes common geometric mapping points in the query and trainer images that are generated from a radial pattern originated at the center of the query image. The radial algorithm differs most from the grid algorithm because it is not iterative. It is a one shot algorithm where a single pattern is generated from parameters that are designed to provide a dense radial pattern. It can be much more efficient than the grid algorithm but runs a higher risk of failure due to underdetermination of sufficient number of common geometric points. This is the default algorithm if one is not specified by the user. The parameters that can be provided to customize the radial pattern created in this algorithm are described in the following table.
This algorithm produces a set of rings with increasing point density along each ring. It may perform better than the grid algorithm since it makes a single pattern in the image. This pattern is used to compute common mapping points to compute the homography matrix for determining the prospective matrix to project each trainer image independently. Customizing the FASTGEOM AlgorithmsThe default parameters for FASTGEOM "grid" and "radial" algorithms are used if FASTGEOM=true when findfeatures is run on a set of images. The default values for FASTGEOM are described in the table above and available in $ISISROOT/appdata/templates/findfeatures/findfeatures_fastgeom_defaults.pvl. This file can be copied and edited as needed for project wide application of FASTGEOM parameters. This file is intended to be provided in the findfeatures PARAMETERS program option. It can coexist along with Feature Matching PVL parameters. Note this combination of parameters neatly centralizes all algorithms and their parameters in one file specifed at runtime to achieve desired behavior in all findfeatures algorithms. Each set of parameters for a particular algorithm can be placed in their own specific PVL Object or Group section with arbitrary names in this file.
However, as is with the Feature Matching parameterization, the
findfeatures GLOBALS program option can also be used to specify
or alter each FASTGEOM algorithm in the same way it is used to
change Feature Matching behavior. Any FASTGEOM parameter in both
the Grid and Radial algorithms can be specifed according to the
ALGORITHM string specification described above. Perhaps the most
useful aspect of this program option is to directly specify the
FASTGEOM option to use at runtime. For example, the "grid" algorithm
can be selected at runtime as "GLOBALS=FastGeomAlgorithm:grid" thus
overriding the default "radial" algorithm. Note all algorithm keywords
specified in the Grid and Radial parameter tables can be provided in
the GLOBALS parameter separated by the Note, as is with the Feature Matching algorithms, any "keyword:value" pair specified in the GLOBALS option takes highest precidence and overrides values specifed by other means, such as contained in the PVL file provided in PARAMETERS or algorithm defaults. Using Debugging to Diagnose BehaviorAn additional feature of findfeatures is a detailed debugging report of processing behavior in real time for all matching and outlier detection algorithms. The data produced by this option is very useful to identify the exact processing step where some matching operations may result in failed matching operations. In turn, this will allow users to alter parameters to address these issues that can lead to better matches that would otherwise not be achieved. To invoke this option, users set DEBUG=TRUE and provide an optional output file (DEBUGLOG=filename) where the debug data is written. If no file is specified, output defaults to the terminal device. Below is an example (see the example section for details) of a debug session with line numbers added for reference of the description that follows. The findfeatures command used to generate this example is:
findfeatures algorithm='fastx@threshold:25@type:2/brief/parameters@maxpoints:500' \
match=EW0211981114G.cub \
from=EW0242463603G.cub \
fastgeom=true \
geomtype=camera \
geomsource=both \
fastgeompoints=25 \
epitolerance=3.0 \
ratio=0.99 \
hmgtolerance=3.0 \
globals='FastGeomDumpMapping:true' \
networkid="EW0211981114G_EW0242463603G" \
pointid='EW211981116G_????' \
onet=EW0211981114G.net \
tolist=EW0211981114G_cubes.lis \
tonogeom=EW0211981114G_nogeom.lis \
tonotmatched=EW0211981114G_notmatched.lis \
description='Create image-image control network' \
debug=true \
debuglog=EW0211981114G.debug.log
Note the file TONOGEOM is not created since there were no failures in FASTGEOM processing. The TONOTMATCHED file is also not created because all files in FROM/FROMLIST were successfully included in the output control network. 1: --------------------------------------------------- 2: Program: findfeatures 3: Version 1.2 4: Revision: 2023-06-09 5: RunTime: 2023-06-16T15:27:19 6: OpenCV_Version: 4.5.5 7: 8: System Environment... 9: Number available CPUs: 8 10: Number default threads: 8 11: Total threads: 8 12: 13: Image load started at 2023-06-16T15:27:19 14: 15: ++++ Running FastGeom ++++ 16: *** QueryImage: EW0211981114G.cub 17: *** TrainImage: EW0242463603G.cub 18: FastGeomAlgorithm: radial 19: FastGeomPoints: 25 20: FastGeomTolerance: 3 21: FastGeomQuerySampleTolerance: 0 22: FastGeomQueryLineTolerance: 0 23: FastGeomTrainSampleTolerance: 0 24: FastGeomTrainLineTolerance: 0 25: 26: --> Using Radial Algorithm train-to-query mapping <-- 27: FastGeomMaximumRadius: 724.077 28: FastGeomRadialSegmentLength: 25 29: FastGeomRadialPointCount: 5 30: FastGeomRadialPointFactor: 1 31: FastGeomRadialSegments: 29 32: 33: ==> Radial Point Mapping complete <== 34: TotalPoints: 2031 35: ImagePoints: 1333 36: MappedPoints: 1333 37: InTrainMapFOV: 636 38: 39: --> Dumping radial points <--- 40: PointDumpFile: EW0211981114G_EW0242463603G.radial.fastgeom.csv 41: TotalPoints: 1333 42: 43: ==> Geometric Correspondence Mapping complete <== 44: TotalPoints: 636 45: 46: --> Running Homography Image Transform <--- 47: IntialPoints: 636 48: Tolerance: 3 49: TotalLmedsInliers: 563 50: PercentPassing: 88.522 51: 52: MatrixTransform: 53: 0.645981,-0.0158572,113.771 54: -0.0350108,0.628872,337.353 55: -8.52086e-05,2.53351e-06,1 56: 57: Image load complete at 2023-06-16T15:27:19 58: 59: Total Algorithms to Run: 1 60: 61: @@ matcher-pair started on 2023-06-16T15:27:19 62: 63: +++++++++++++++++++++++++++++ 64: Entered RobustMatcher::match(MatchImage &query, MatchImage &trainer)... 65: Specification: fastx@threshold:25@type:2/brief/parameters@maxpoints:500/BFMatcher@NormType:NORM_HAMMING@CrossCheck:false 66: ** Query Image: EW0211981114G.cub 67: FullSize: (1024, 1024) 68: Rendered: (1024, 1024) 69: ** Train Image: EW0242463603G.cub 70: FullSize: (1024, 1024) 71: Rendered: (1024, 1024) 72: --> Feature detection... 73: Keypoints restricted by user to 500 points... 74: Total Query keypoints: 512 [14121] 75: Total Trainer keypoints: 518 [9511] 76: Processing Time: 0.005 77: Processing Keypoints/Sec: 4.7264e+06 78: --> Extracting descriptors... 79: Processing Time(s): 0.005 80: Processing Descriptors/Sec: 4.7264e+06 81: 82: *Removing outliers from image pairs 83: Entered RobustMatcher::removeOutliers(Mat &query, vector<Mat> &trainer)... 84: --> Matching 2 nearest neighbors for ratio tests.. 85: Query, Train Descriptors: 452, 502 86: Computing query->train Matches... 87: Total Matches Found: 452 88: Processing Time: 0.001 89: Matches/second: 452000 90: Computing train->query Matches... 91: Total Matches Found: 502 92: Processing Time: 0.001 <seconds> 93: Matches/second: 502000 94: -Ratio test on query->train matches... 95: Entered RobustMatcher::ratioTest(matches[2]) for 2 NearestNeighbors (NN)... 96: RobustMatcher::Ratio: 0.99 97: Total Input Matches Tested: 452 98: Total Passing Ratio Tests: 421 99: Total Matches Removed: 31 100: Total Failing NN Test: 31 101: Processing Time: 0 102: -Ratio test on train->query matches... 103: Entered RobustMatcher::ratioTest(matches[2]) for 2 NearestNeighbors (NN)... 104: RobustMatcher::Ratio: 0.99 105: Total Input Matches Tested: 502 106: Total Passing Ratio Tests: 469 107: Total Matches Removed: 33 108: Total Failing NN Test: 33 109: Processing Time: 0 110: Entered RobustMatcher::symmetryTest(matches1,matches2,symMatches)... 111: -Running Symmetric Match tests... 112: Total Input Matches1x2 Tested: 421 x 469 113: Total Passing Symmetric Test: 194 114: Processing Time: 0 115: Entered RobustMatcher::computeHomography(keypoints1/2, matches...)... 116: -Running RANSAC Constraints/Homography Matrix... 117: RobustMatcher::HmgTolerance: 3 118: Number Initial Matches: 194 119: Total 1st Inliers Remaining: 149 120: Total 2nd Inliers Remaining: 149 121: Processing Time: 0 122: Entered EpiPolar RobustMatcher::ransacTest(matches, keypoints1/2...)... 123: -Running EpiPolar Constraints/Fundamental Matrix... 124: RobustMatcher::EpiTolerance: 3 125: RobustMatcher::EpiConfidence: 0.99 126: Number Initial Matches: 149 127: Inliers on 1st Epipolar: 149 128: Inliers on 2nd Epipolar: 146 129: Total Passing Epipolar: 146 130: Processing Time: 0.005 131: Entered RobustMatcher::computeHomography(keypoints1/2, matches...)... 132: -Running RANSAC Constraints/Homography Matrix... 133: RobustMatcher::HmgTolerance: 3 134: Number Initial Matches: 146 135: Total 1st Inliers Remaining: 145 136: Total 2nd Inliers Remaining: 145 137: Processing Time: 0.001 138: %% match-pair complete in 0.019 seconds! 139: 140: Entering MatchMaker::network(cnet, solution, pointmaker)... 141: Images Matched: 1 142: ControlPoints created: 145 143: ControlMeasures created: 290 144: InvalidIgnoredPoints: 0 145: InvalidIgnoredMeasures: 0 146: PreserveIgnoredControl No 147: 148: -- Valid Point/Measure Statistics -- 149: ValidPoints 145 150: MinimumMeasures: 2 151: MaximumMeasures: 2 152: AverageMeasures: 2 153: StdDevMeasures: 0 154: TotalMeasures: 290 155: 156: Session complete in 00:00:00.277 of elapsed time In the above example, lines 2-11 provide general information about the program and compute environment. If MAXTHREADS were set to a value less than 8, the number of total threads (line 11) would reflect this number. Lines 13 indicates the time when image loading was initiated. Lines 15-55 reports the results of FASTGEOM processing for all input images. In this case, there is only one image processed. Lines 16-55 would repeat for every image pair that is processed by the FASTGEOM algorithm. Lines 18-24 indicate the values determined the common algorithm parameters as shown in the FASTGEOM Common Parameters table. Lines 26-31 indicate the parameters determined/used for the radial mapping algorithm (the default) as described in the FASTGEOM Radial Parameters table. Lines 33-37 report the mapping results between the query and train images. The TotalPoints are larger than the ImagePoints due to the nature of the radial algorithm which includes the points outside the boundaries of the FOV of the query image in the outer rings of the radial pattern generated. Lines 39-41 indicate the dump file for the mapped points. It exists only because we added "globals=FastGeomDumpMapping:true" to the command line. This file is generated from the base names of the input files. Line 44 indicates the number of valid points in both images used to construct the homography transformation matrix applied by a perspective warp algorithm on the train image. Lines 46-50 report the results of the generation of the homography matrix. And finally, lines 52-55 show the actual homography matrix produced for this image pair. After all images are processed by the FASTGEOM algorithm, line 57 reports the processing time the algorithm completed. Line 61 specifies the precise time the matcher algorithm was invoked. Line 64-71 shows the algorithm string specification, names of query (MATCH) and train (FROM/FROLIST) images and the full and rendered sizes of images. Lines 74 and 75 show the total number of keypoints or features that were returned [detected] by the FASTX detector for both the query (512 [14121]) and train (518 [9511]) images. Lines 78-80 indicate the descriptors of all the feature keypoints are being extracted. Extraction of keypoint descriptors can be costly under some conditions. Users can restrict the number of features detected by using the MAXPOINTS parameter, which was provided in the parameters of the ALGORITHM specification for this run. The values in brackets in lines 74 and 75 will show (and differ from) the total amount of features detected if MAXPOINTS is provided. Outlier detection begins at line 82. The Ratio test is performed first. Here the matcher algorithm is invoked for each match pair, regardless of the number of train (FROMLIST) images provided. For each keypoint in the query image, the two nearest matches in the train image are computed and the results are reported in lines 86-89. Then the bi-directional matches are computed in lines 90-93. A bi-directional ratio test is computed for the query->train matches in lines 94-101 and then train->query in lines 102-109. You can see here that a significant number of matches are removed in this step. Users can adjust this behavior, retaining more points by setting the RATIO parameter closer to 1.0. The symmetry test, ensuring matches from query->train have the same match as train->query, is reported in lines 110-114. In lines 115-121, the homography matrix is computed and outliers are removed where the tolerance exceeds HMGTOLERANCE. Lines 122-130 shows the results of the epipolar fundamental matrix computation and outlier detection. Matching is completed in lines 131-137 which report the final spatial homography computations to produce the final transformation matrix between the query and train images. Line 136 shows the final number of control measures computed between the image pairs. Lines 82-137 are repeated for each query/train image pair (with perhaps slight formatting differences). Line 138 shows the total processing time for the matching process. Lines 140-146 report the generation of the control network. This process connects all the same features in the each of the images (control measures) into individual sets of control points. Users can also choose to preserve all ignored control points by adding "PreserveIgnoredControl:true" in the GLOBALS parameter. The value used specified is reported on line 146. If true, this will result in some control points being marked as ignored in the output control point. These kinds of points will typically be created when GEOMSOURCE=both and all control measures within a control point fails valid geometry tests when the output network is created. Evaluation of Matcher Algorithm Performancefindfeatures provides users with many features and options to create unique algorithms that are suitable for many of the diverse image matching conditions that naturally occur during a spacecraft mission. Some are more suited for certain conditions than others. But how does one determine which algorithm combination performs the best for an image pair? By computing standard performance metrics, one can make a determination as to which algorithm performs best. Using the ALGOSPECFILE parameter, users can specify one or more algorithms to apply to a given image matching process. Each algorithm specified, one per line in the input file, results in the creation of a unique robust matcher algorithm that is applied to the input files in succession. The performance of each algorithm is computed for each of the matcher from a standard set of metrics described in a thesis titled Efficient matching of robust features for embedded SLAM. From the metrics described in this paper, a single metric that measures the abilities of the whole matching process is computed that are relevant to all three FBM steps: detection, description and matching. This metric is called Efficiency. The Efficiency metric is computed from two other metrics called Repeatability and Recall. Repeatability represents the ability to detect the same point in the scene under viewpoint and lighting changes and subject to noise. The value of Repeatability is calculated as:
Repeatability = |correspondences| / |query keypoints|
Recall represents the ability to find the correct matches based on the description of detected features, The value of Recall is calculated as:
Recall = |correct matches| / |correspondences|
Efficiency combines the Repeatability and Recall. It is defined as:
Efficiency = Repeatability * Recall = |correct matches| / |query
keypoints|
findfeatures computes the Efficiency for each algorithm and selects the matcher algorithm combination with the highest value. This value is reported at the end of the run of application in the MatchSolution group. Here is an example:
Group = MatchSolution
Matcher = orb@nfeatures:3000/sift/BFMatcher@NormType:NORM_L2@CrossCheck:false
MatchedPairs = 1
ValidPairs = 1
Efficiency = 0.019733333333333
End_Group
CategoriesHistory
|
Parameter GroupsFiles
Algorithms
Constraints
Image Transformation Options
Control
|
Files: FROM
Description
This cube/image (train) will be translated to register to the MATCH (query) cube/image. This application supports other common image formats such as PNG, TIFF or JPEG. Essentially any image that can be read by OpenCV's imread()routine is supported. All input images are converted to 8-bit when they are read.
| Type | cube |
|---|---|
| File Mode | input |
| Default | None |
| Filter | *.cub |
Files: FROMLIST
Description
Use this parameter to select a filename which contains a list of cube filenames. The cubes identified inside this file will be used to create the control network. All input images are converted to 8-bit when they are read. The following is an example of the contents of a typical FROMLIST file:
AS15-M-0582_16b.cub
AS15-M-0583_16b.cub
AS15-M-0584_16b.cub
AS15-M-0585_16b.cub
AS15-M-0586_16b.cub
AS15-M-0587_16b.cub
Each file name in a FROMLIST file should be on a separate line.
| Type | filename |
|---|---|
| File Mode | input |
| Internal Default | None |
| Filter | *.lis |
Files: MATCH
Description
Name of the image to match to. This will be the reference image in the output control network. It is also referred to as the query image in OpenCV documentation. All input images are converted to 8-bit when they are read.
| Type | cube |
|---|---|
| File Mode | input |
| Default | None |
| Filter | *.cub |
Files: ONET
Description
This file will contain the Control Point network results of findfeatures in a binary format. There will be no false or failed matches in the output control network file. Using this control network and TOLIST in the qnet application, the results of findfeatures can be visually assessed.
| Type | filename |
|---|---|
| File Mode | output |
| Internal Default | None |
| Filter | *.net *.txt |
Files: TOLIST
Description
This file will contain the list of (cube) files in the control network. For multi-image matching, some files may not have matches detected. These files will not be written to TOLIST. The MATCH file is always added first and all other images that have matches are added to TOLIST. Using this list and the ONET in the qnet application, the results of findfeatures can be visually assessed.
| Type | filename |
|---|---|
| File Mode | output |
| Internal Default | None |
| Filter | *.lis |
Files: TONOTMATCHED
Description
This file will contain the list of (cube) files that were not successfully matched. This can be used to run through individually with more specifically tailored matcher algorithm specifications.
NOTE this file is appended to so that continual runs will accumulate failures making it easier to handle failed runs.
| Type | filename |
|---|---|
| File Mode | output |
| Internal Default | None |
| Filter | *.lis |
Files: TONOGEOM
Description
This file will contain the list of (cube) files that could not find valid geometry mapping during the FastGeom process. Note that this process uses the current state of geometry for each image, which is likely to be a prior SPICE. This could be the cause of failures rather than no common ground coverage between the MATCH and FROM/FROMLIST images.
NOTE this option supports the scenario where users cannot verify the FROM/FROMLIST images have any common coverage with the MATCH image. Large lists of images will have significantly compute overhead, so use sparingly.
These images are excluded from the matching process since a valid fast geom transform cannot be computed and are written to a file name as specfied in this parameter.
| Type | filename |
|---|---|
| File Mode | output |
| Internal Default | None |
| Filter | *.lis |
Algorithms: ALGORITHM
Description
This parameter provides user control over selecting a wide variety of feature detectors, extractors and matcher combinations. This parameter also provides a mechanism to set any of the valid parameters of the algoritms.
| Type | string |
|---|---|
| Internal Default | None |
Algorithms: ALGOSPECFILE
Description
To accomodate a potentially large set of feature algorithms, you can provide them in a file. This format is the same as the ALGORITHM format, but each unique algorithm must be specifed on a seperate line. Thoeretically, the number you specify is unlimited. This option is particularly useful to generate a series of algorithms that vary parameters for any of the elements of the feature algorithm.
| Type | filename |
|---|---|
| Internal Default | None |
| Filter | *.lis |
Algorithms: LISTSPEC
Description
If true, information about the detector, extractor, matcher, and parameters specified in the ALGORITHM or ALGOSPECFILE parameters will be output. If multiple sets of algorithms are specified, then the details for each set will be output.
| Type | boolean |
|---|---|
| Default | No |
Algorithms: LISTALL
Description
This parameter will retrieve all the registered OpenCV algorithms available that can created by name.
| Type | boolean |
|---|---|
| Default | No |
Algorithms: TOINFO
Description
When an information option is requested (LISTSPEC), the user can provide the name of an output file here where the information, in the form of a PVL structure, will be written. If any of those options are selected by the user, and a file is not provided in this option, the output is written to the screen or GUI.
One very nifty option that works well is to specify the
terminal device as the output file. This will list the
results to the screen so that your input can be quickly
checked for accuracy. Here is an example using the algorithm
listing option and the result:
findfeatures listspec=true
algorithm=detector.Blob@minrepeatability:1/orb
toinfo=/dev/tty
Object = FeatureAlgorithms
Object = RobustMatcher
OpenCVVersion = 3.1.0
Name = detector.Blob@minrepeatability:1/orb/BFMatcher@NormType:N-
ORM_HAMMING@CrossCheck:false
Object = Detector
CVVersion = 3.1.0
Name = Blob
Type = Feature2D
Features = Detector
Description = "The OpenCV simple blob detection algorithm. See the
documentation at
http://docs.opencv.org/3.1.0/d0/d7a/classcv_1_1SimpleBlo-
bDetector.html"
CreatedUsing = detector.Blob@minrepeatability:1
Group = Parameters
BlobColor = 0
FilterByArea = true
FilterByCircularity = false
FilterByColor = true
FilterByConvexity = true
FilterByInertia = true
MaxArea = 5000
maxCircularity = inf
MaxConvexity = inf
MaxInertiaRatio = inf
MaxThreshold = 220
MinArea = 25
MinCircularity = 0.8
MinConvexity = 0.95
MinDistance = 10
MinInertiaRatio = 0.1
minrepeatability = 1
MinThreshold = 50
ThresholdStep = 10
End_Group
End_Object
Object = Extractor
CVVersion = 3.1.0
Name = ORB
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV ORB Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/db/d95/classcv_1_1ORB.html"
CreatedUsing = orb
Group = Parameters
edgeThreshold = 31
fastThreshold = 20
firstLevel = 0
nfeatures = 500
nlevels = 8
patchSize = 31
scaleFactor = 1.2000000476837
scoreType = HARRIS_SCORE
WTA_K = 2
End_Group
End_Object
Object = Matcher
CVVersion = 3.1.0
Name = BFMatcher
Type = DecriptorMatcher
Features = Matcher
Description = "The OpenCV BFMatcher DescriptorMatcher matcher
algorithm. See the documentation at
http://docs.opencv.org/3.1.0/d3/da1/classcv_1_1BFMatcher-
.html"
CreatedUsing = BFMatcher@NormType:NORM_HAMMING@CrossCheck:false
Group = Parameters
CrossCheck = No
NormType = NORM_HAMMING
End_Group
End_Object
Object = Parameters
EpiConfidence = 0.99
EpiTolerance = 3.0
FastGeom = false
FastGeomPoints = 25
Filter = None
GeomSource = MATCH
GeomType = CAMERA
HmgTolerance = 3.0
MaxPoints = 0
MinimumFundamentalPoints = 8
MinimumHomographyPoints = 8
Ratio = 0.65
RefineFundamentalMatrix = true
RootSift = false
SavePath = $PWD
SaveRenderedImages = false
End_Object
End_Object
End_Object
End
| Type | filename |
|---|---|
| Default | /dev/tty |
Algorithms: DEBUG
Description
At times, things go wrong. By setting DEBUG=TRUE, information is printed as elements of the matching algorithm are executed. This option is very helpful to monitor the entire matching and outlier detection processing to determine where adjustments in the parameters can be made to produce better results.
| Type | boolean |
|---|---|
| Default | false |
Algorithms: DEBUGLOG
Description
Provide a file that will have all the debugging content appended as it is generated in the processing steps. This file can be very useful to determine, for example, where in the matching and or outlier detection most of the matches are being rejected. The output can be lengthy and detailed, but is critical in the determination where adjustments to the parameters can be made to provide better results.
| Type | filename |
|---|---|
| Internal Default | None |
| Filter | *.log |
Algorithms: PARAMETERS
Description
This file can contain specialized parameters that will modify certain behaviors in the robust matcher and FASTGEOM algorithms. They can vary over time and are documented in the application descriptions.
| Type | filename |
|---|---|
| Internal Default | None |
| Filter | *.conf |
Algorithms: GLOBALS
Description
This string can contain additional parameters that will set or reset global parameters provded by other mechanisms. This program option is primarily useful for making small scale adjustments to algorithm parameters in a convenient and efficient manner.
For example, using this parameter is the most straightforward way to select the FASTGEOM algorithm. To select the FASTGEOM Grid algorithm and constrain the number of interations to 10, use GLOBALS=FastGeomAlgorithm:Grid@FastGeomGridStopIteration:10".
There is very little robust error detection or any confirmation that the parameter names are valid. Any misspelled parameters are not detected and ill-formed parameter strings may not result in errors, but passthrough and mangle other parameter construction.
| Type | string |
|---|---|
| Internal Default | None |
Algorithms: MAXPOINTS
Description
Specifies the maximum number of keypoints to save in the detection phase. If a value is not provided for this parameter, there will be no restriction set on the number of keypoints that will be used to match. If specified, then approximately MAXPOINTS keypoints with the highest/best detector response values are retained and passed on to the extractor and matcher algorithms. This parameter is useful for detectors that produce a high number of features. A large number of features will cause the matching phase and outlier detection to become costly and inefficient.
| Type | integer |
|---|---|
| Default | 0 |
Constraints: RATIO
Description
For each feature point, we have two candidate matches in the other image. These are the two best ones based on the distance between their descriptors. If this measured distance is very low for the best match, and much larger for the second best match, we can safely accept the first match as a good one since it is unambiguously the best choice. Reciprocally, if the two best matches are relatively close in distance, then there exists a possibility that we make an error if we select one or the other. In this case, we should reject both matches. Here, we perform this test by verifying that the ratio of the distance of the best match over the distance of the second best match is not greater than a given RATIO threshold. Most of the matches will be removed by this test. The farther from 1.0, the more matches will be rejected.
| Type | double |
|---|---|
| Default | 0.65 |
Constraints: EPITOLERANCE
Description
The tolerance specifies the maximum distance in pixels that feature may deviate from the Epipolar lines for each matching feature.
| Type | double |
|---|---|
| Default | 3.0 |
Constraints: EPICONFIDENCE
Description
This parameter indicates the confidence level of the epipolar determination ratio. A value of 1.0 requires that all pixels be valid in the epipolar computation.
| Type | double |
|---|---|
| Default | 0.99 |
Constraints: HMGTOLERANCE
Description
If we consider the special case where two views of a scene are separated by a pure rotation, then it can be observed that the fourth column of the extrinsic matrix will be made of all 0s (that is, translation is null). As a result, the projective relation in this special case becomes a 3x3 matrix. This matrix is called a homography and it implies that, under special circumstances (here, a pure rotation), the image of a point in one view is related to the image of the same point in another by a linear relation.
The parameter is used as a tolerance in the computation of the distance between keypoints using the homography matrix relationship between the MATCH image and each FROM/FROMLIST image. This will throw points out that are (dist > TOLERANCE * min_dist), the smallest distance between points.
| Type | double |
|---|---|
| Default | 3.0 |
Constraints: MAXTHREADS
Description
This parameter allows users to control the number of threads to use for image matching. A default is to use all available threads on system. If MAXTHREADS is specified, the maximum number of CPUs are used if it exceeds the number of CPUs physically available on the system or no more than MAXTHREADS will be used.
| Type | integer |
|---|---|
| Default | 0 |
Image Transformation Options: FASTGEOM
Description
When TRUE, this option will perform a fast geometric linear transformation that projects each FROM/FROMLIST image to the camera space of the MATCH image. Note this option theoretically is not needed for scale/rotation invariant feature matchers such as SIFT and SURF but there are limitations as to the invariance of these matchers. For matchers that are not scale and rotation invariant, this (or something like it) will be required to orient each images to similar spatial consistency. Users should determine the capabilities of the matchers used.
| Type | boolean |
|---|---|
| Default | false |
Image Transformation Options: FASTGEOMPOINTS
Description
Specify the minimun number of common geometry mapping points used to compute the FASTGEOM homography transformation matrix that is used in the perspective warp of a FROM/FROMLIST image into the camera space of the MATCH image.
| Type | integer |
|---|---|
| Default | 25 |
Image Transformation Options: GEOMTYPE
Description
Provide options as to how FASTGEOM projects data in the FROM (train) image to the MATCH (query) image space.
| Type | string | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Default | CAMERA | ||||||||||||
| Option List: |
|
Image Transformation Options: FILTER
Description
Apply an image filter to both images before matching. These filters are typically used in cases of low emission or incidence angles are present. They are intended to remove albedo and highlight edges and are well-suited for these types of feature detectors.
| Type | string | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Default | None | ||||||||||||
| Option List: |
|
Control: NETWORKID
Description
The ID or name of this particular control network. This string will be added to the output control network file, and can be used to identify the network.
| Type | string |
|---|---|
| Default | Features |
Control: POINTID
Description
This string will be used to create unique IDs for each control point created by this program. The string must contain a single series of question marks ("?"). For example: "VallesMarineris????"
The question marks will be replaced with a number beginning with zero and incremented by one each time a new control point is created. The example above would cause the first control point to have an ID of "VallesMarineris0000", the second ID would be "VallesMarineris0001" and so on. The maximum number of new control points for this example would be 10000 with the final ID being "VallesMarineris9999".
Note: Make sure there are enough "?"s for all the control points that might be created during this run. If all the possible point IDs are exhausted the program will exit with an error, and will not produce an output control network file. The number of control points created depends on the size and quantity of image overlaps and the density of control points as defined by the DEFFILE parameter.
Examples of POINTID:
- POINTID="JohnDoe?????"
- POINTID="Quad1_????"
- POINTID="JD_???_test1"
| Type | string |
|---|---|
| Default | FeatureId_????? |
Control: POINTINDEX
Description
This parameter can be used to specify the starting POINTID index number to assist in the creation of unique control point identifiers. Users must determine the highest used index and use the next number in the sequence to provide unique point ids.
| Type | integer |
|---|---|
| Default | 1 |
Control: DESCRIPTION
Description
A text description of the contents of the output control network. The text can contain anything the user wants. For example it could be used to describe the area of interest the control network is being made for.
| Type | string |
|---|---|
| Default | Find features in image pairs or list |
Control: NETTYPE
Description
There are two types of control network files that can be created in this application: IMAGE and GROUND. For IMAGE types, the pair is assumed to be overlapping pairs where control measures for both images are created. For NETTYPE=GROUND, only the FROM file measure is recorded for purposes of dead reckoning of the image using jigsaw.
| Type | string | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Default | IMAGE | |||||||||
| Option List: |
|
Control: GEOMSOURCE
Description
For input files that provide geometry, specify which one provides the latitude/longitude values for each control point. NONE is an acceptable option for which there is no geometry available. Otherwise, the user must choose FROM or MATCH as the cube file that wil provide geometry.
| Type | string | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Default | MATCH | |||||||||||||||
| Option List: |
|
Control: TARGET
Description
This parameter is optional and not neccessary if using Level 1 ISIS cube files. It specifies the name of the target body that the input images are acquired of. If the input images are ISIS images, this value is retrieved from the camera model or map projection.
| Type | string |
|---|---|
| Internal Default | None |
Example 1Run matcher on pair of MESSENGER images Description
This example shows the results of matching two overlapping messenger
images of different scales. The following command was used to
produce the output network:
findfeatures algorithm="surf@hessianThreshold:100/surf" \
match=EW0211981114G.lev1.cub \
from=EW0242463603G.lev1.cub \
epitolerance=1.0 ratio=0.650 hmgtolerance=1.0 \
networkid="EW0211981114G_EW0242463603G" \
pointid="EW0211981114G_?????" \
onet=EW0211981114G.net \
description="Test MESSENGER pair" debug=true \
debuglog=EW0211981114G.log
Note that the fast geom option is not used for this example because
the SURF algorithm is scale and rotation invariant. Here is the
algorithm information for the specification of the matcher
parameters:
Object = FeatureAlgorithms
Object = RobustMatcher
OpenCVVersion = 3.1.0
Name = surf@hessianThreshold:100/surf/BFMatcher
Object = Detector
CVVersion = 3.1.0
Name = SURF
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV SURF Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d5/df7/classcv_1_1xfeatures-
2d_1_1SURF.html"
CreatedUsing = surf@hessianThreshold:100
Group = Parameters
Extended = No
hessianThreshold = 100
NOctaveLayers = 3
NOctaves = 4
Upright = No
End_Group
End_Object
Object = Extractor
CVVersion = 3.1.0
Name = SURF
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV SURF Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d5/df7/classcv_1_1xfeatures-
2d_1_1SURF.html"
CreatedUsing = surf
Group = Parameters
Extended = No
HessianThreshold = 100.0
NOctaveLayers = 3
NOctaves = 4
Upright = No
End_Group
End_Object
Object = Matcher
CVVersion = 3.1.0
Name = BFMatcher
Type = DecriptorMatcher
Features = Matcher
Description = "The OpenCV BFMatcher DescriptorMatcher matcher
algorithm. See the documentation at
http://docs.opencv.org/3.1.0/d3/da1/classcv_1_1BFMatcher-
.html"
CreatedUsing = BFMatcher
Group = Parameters
CrossCheck = No
NormType = NORM_L2
End_Group
End_Object
Object = Parameters
EpiConfidence = 0.99
EpiTolerance = 3.0
FastGeom = false
FastGeomPoints = 25
Filter = None
GeomSource = MATCH
GeomType = CAMERA
HmgTolerance = 3.0
MaxPoints = 0
MinimumFundamentalPoints = 8
MinimumHomographyPoints = 8
Ratio = 0.65
RefineFundamentalMatrix = true
RootSift = false
SavePath = $PWD
SaveRenderedImages = false
End_Object
End_Object
End_Object
End
The output debug log file and a line-by-line description of the result is shown in the main application documention. And here is the screen shot of qnet for the resulting network: 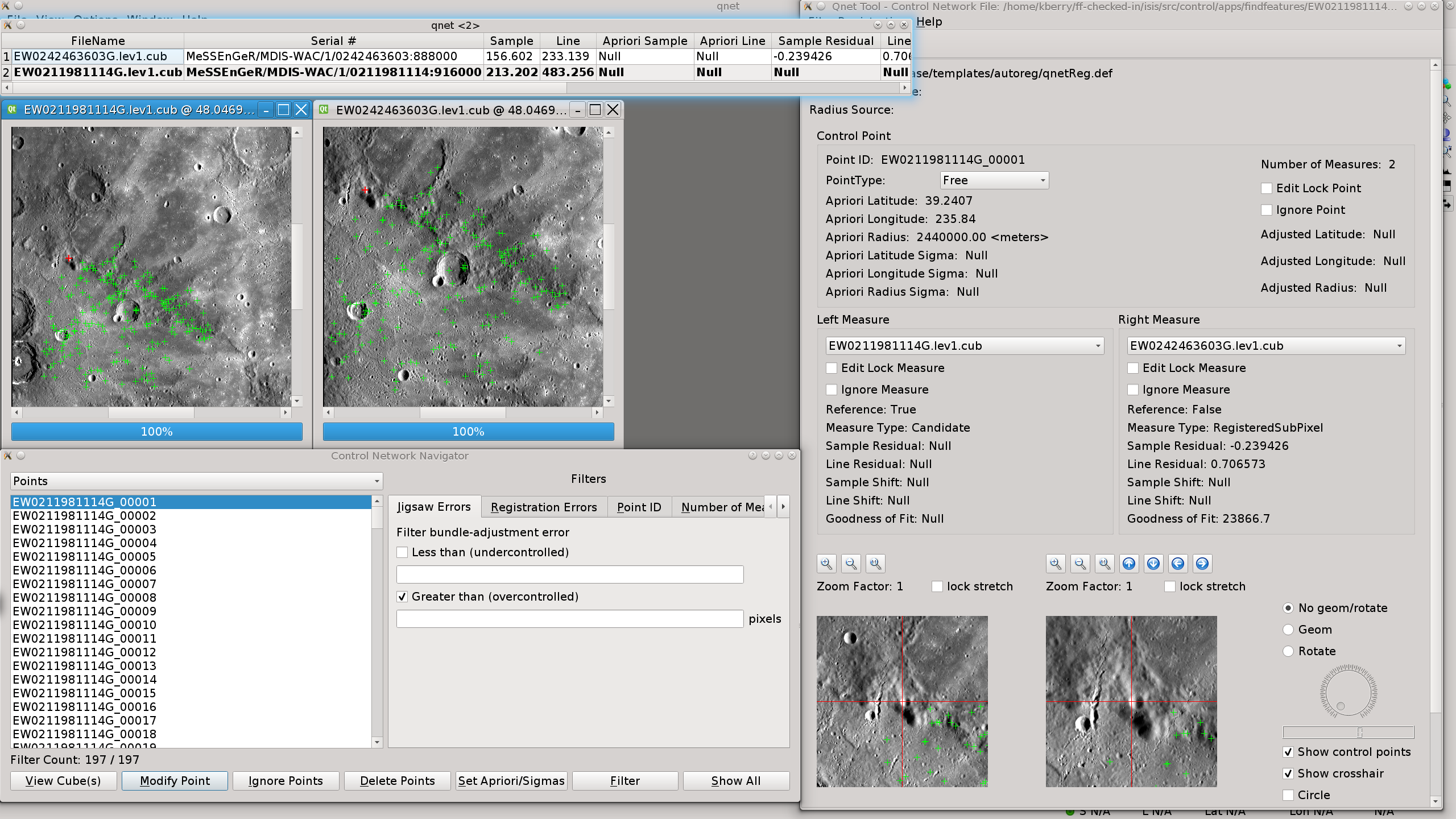
|
Example 2Show all the available algorithms and their default parameters Description
This provides a reference for all the current algorithms and their default parameters. This list may not include all the available OpenCV algorithms nor may all algorithms be applicable. Users should rerun this command to get the current options available on your system as they may differ.
findfeatures listall=yes
Object = Algorithms
Object = Algorithm
CVVersion = 4.5.5
Name = AGAST
Type = Feature2D
Features = Detector
Description = "The OpenCV AGAST Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d7/d19/classcv_1_1AgastFeatur-
eDetector.html"
CreatedUsing = agast
Aliases = (agast, detector.agast)
Group = Parameters
NonmaxSuppression = Yes
Threshold = 10
Type = OAST_9_16
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = AKAZE
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV AKAZE Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d8/d30/classcv_1_1AKAZE.html"
CreatedUsing = akaze
Aliases = (akaze, detector.akaze, extractor.akaze, feature2d.akaze)
Group = Parameters
DescriptorChannels = 3
DescriptorSize = 0
DescriptorType = DESCRIPTOR_MLDB
Diffusivity = DIFF_PM_G2
NOctaveLayers = 4
NOctaves = 4
Threshold = 0.0010000000474975
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = Blob
Type = Feature2D
Features = Detector
Description = "The OpenCV simple blob detection algorithm. See the
documentation at
http://docs.opencv.org/3.1.0/d0/d7a/classcv_1_1SimpleBlobD-
etector.html"
CreatedUsing = blob
Aliases = (blob, detector.blob)
Group = Parameters
BlobColor = 0
FilterByArea = true
FilterByCircularity = false
FilterByColor = true
FilterByConvexity = true
FilterByInertia = true
MaxArea = 5000
maxCircularity = inf
MaxConvexity = inf
MaxInertiaRatio = inf
MaxThreshold = 220
MinArea = 25
MinCircularity = 0.8
MinConvexity = 0.95
MinDistance = 10
MinInertiaRatio = 0.1
MinRepeatability = 2
MinThreshold = 50
ThresholdStep = 10
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = BRISK
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV BRISK Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/de/dbf/classcv_1_1BRISK.html"
CreatedUsing = brisk
Aliases = (brisk, detector.brisk, extractor.brisk, feature2d.brisk)
Group = Parameters
NOctaves = 3
PatternScale = 1.0
Threshold = 30
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = FAST
Type = Feature2D
Features = Detector
Description = "The OpenCV FAST Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/df/d74/classcv_1_1FASTFeature-
Detector.html"
CreatedUsing = fast
Aliases = (detector.fast, fast, fastx)
Group = Parameters
NonmaxSuppression = Yes
Threshold = 10
Type = TYPE_9_16
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = GFTT
Type = Feature2D
Features = Detector
Description = "The OpenCV GFTT Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/df/d21/classcv_1_1GFTTDetecto-
r.html"
CreatedUsing = gftt
Aliases = (detector.gftt, gftt)
Group = Parameters
BlockSize = 3
HarrisDetector = No
K = 0.04
MaxFeatures = 1000
MinDistance = 1.0
QualityLevel = 0.01
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = KAZE
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV KAZE Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d3/d61/classcv_1_1KAZE.html"
CreatedUsing = kaze
Aliases = (detector.kaze, extractor.kaze, feature2d.kaze, kaze)
Group = Parameters
Diffusivity = DIFF_PM_G2
Extended = No
NOctaveLayers = 4
NOctaves = 4
Threshold = 0.0010000000474975
Upright = No
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = MSD
Type = Feature2D
Features = Detector
Description = "The OpenCV MSD Feature2D detector/extractor algorithm. See
the documentation at
http://docs.opencv.org/3.1.0/d6/d36/classcv_1_1xfeatures2d-
_1_1MSD.html"
CreatedUsing = msd
Aliases = (detector.msd, msd)
Group = Parameters
ComputeOrientation = false
KNN = 4
NMSRadius = 5
NMSScaleRadius = 0
NScales = -1
PatchRadius = 3
ScaleFactor = 1.25
SearchAreaRadius = 5
THSaliency = 250.0
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = MSER
Type = Feature2D
Features = Detector
Description = "The OpenCV MSER Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d3/d28/classcv_1_1MSER.html"
CreatedUsing = mser
Aliases = (detector.mser, mser)
Group = Parameters
AreaThreshold = 1.01
Delta = 5
EdgeBlurSize = 5
MaxArea = 14400
MaxEvolution = 200
MaxVariation = 0.25
MinArea = 60
MinDiversity = 0.2
MinMargin = 0.003
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = ORB
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV ORB Feature2D detector/extractor algorithm. See
the documentation at
http://docs.opencv.org/3.1.0/db/d95/classcv_1_1ORB.html"
CreatedUsing = orb
Aliases = (detector.orb, extractor.orb, feature2d.orb, orb)
Group = Parameters
edgeThreshold = 31
fastThreshold = 20
firstLevel = 0
nfeatures = 500
nlevels = 8
patchSize = 31
scaleFactor = 1.2000000476837
scoreType = HARRIS_SCORE
WTA_K = 2
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = SIFT
Type = Feature2D
Features = (Detector, Extractor)
Description = "The OpenCV SIFT Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d5/d3c/classcv_1_1xfeatures2d-
_1_1SIFT.html"
CreatedUsing = sift
Aliases = (detector.sift, extractor.sift, feature2d.sift, sift)
Group = Parameters
constrastThreshold = 0.04
edgeThreshold = 10
nfeatures = 0
nOctaveLayers = 3
sigma = 1.6
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = Star
Type = Feature2D
Features = Detector
Description = "The OpenCV Star Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d6/d36/classcv_1_1xfeatures2d-
_1_1Star.html"
CreatedUsing = star
Aliases = (detector.star, star)
Group = Parameters
LineThresholdBinarized = 8
LineThresholdProjected = 10
MaxSize = 45
ResponseThreshold = 30
SuppressNonmaxSize = 5
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = Brief
Type = Feature2D
Features = Extractor
Description = "The OpenCV simple blob detection algorithm. See the
documentation at
http://docs.opencv.org/3.1.0/d0/d7a/classcv_1_1SimpleBlobD-
etector.html"
CreatedUsing = brief
Aliases = (brief, extractor.brief)
Group = Parameters
Bytes = 32
UseOrientation = true
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = DAISY
Type = Feature2D
Features = Extractor
Description = "The OpenCV DAISY Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d9/d37/classcv_1_1xfeatures2d-
_1_1DAISY.html"
CreatedUsing = daisy
Aliases = (daisy, extractor.daisy)
Group = Parameters
H = "1,0,0,0,1,0,0,0,1"
interpolation = true
norm = NRM_NONE
q_hist = 8
q_radius = 3
q_theta = 8
radius = 15
use_orientation = false
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = FREAK
Type = Feature2D
Features = Extractor
Description = "The OpenCV FREAK Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/df/db4/classcv_1_1xfeatures2d-
_1_1FREAK.html"
CreatedUsing = freak
Aliases = (extractor.freak, freak)
Group = Parameters
NOctaves = 4
OrientationNormalized = true
PatternScale = 22.0
ScaleNormalized = true
SelectedPairs = Null
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = LATCH
Type = Feature2D
Features = Extractor
Description = "The OpenCV LATCH Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d6/d36/classcv_1_1xfeatures2d-
_1_1LATCH.html"
CreatedUsing = latch
Aliases = (extractor.latch, latch)
Group = Parameters
Bytes = 32
HalfSSDSize = 3
RotationInvariance = true
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = LUCID
Type = Feature2D
Features = Extractor
Description = "The OpenCV LUCID Feature2D detector/extractor algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d6/d36/classcv_1_1xfeatures2d-
_1_1LUCID.html"
CreatedUsing = lucid
Aliases = (extractor.lucid, lucid)
Group = Parameters
BlurKernel = 1
LucidKernel = 1
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = BFMatcher
Type = DecriptorMatcher
Features = Matcher
Description = "The OpenCV BFMatcher DescriptorMatcher matcher algorithm.
See the documentation at
http://docs.opencv.org/3.1.0/d3/da1/classcv_1_1BFMatcher.h-
tml"
CreatedUsing = bfmatcher
Aliases = (bfmatcher, matcher.bfmatcher)
Group = Parameters
CrossCheck = No
NormType = NORM_L2
End_Group
End_Object
Object = Algorithm
CVVersion = 4.5.5
Name = FlannBasedMatcher
Type = DecriptorMatcher
Features = Matcher
Description = "The OpenCV FlannBasedMatcher DescriptorMatcher matcher
algorithm. See the documentation at
http://docs.opencv.org/3.1.0/dc/de2/classcv_1_1FlannBasedM-
atcher.html"
CreatedUsing = flannbasedmatcher
Aliases = (flannbasedmatcher, matcher.flannbasedmatcher)
Group = Parameters
Checks = 32
Epsilon = 0.0
Sorted = Yes
End_Group
End_Object
End_Object
End
|
Example 3Process three images using the default radial FASTGEOM option DescriptionThis example is a variation of example 1 that runs the images in a different way. This example uses the FASTGEOM option with the default settings applied to the same images. There is an additional image included that has no overlap with the MATCH image. When FASTGEOM is used, all images that cannot be mapped using ISIS geometry are excluded from the matching process. If a filename is provided in TONOGEOM option, images that do not have any common mapping points generated by the FASTGEOM pattern algorithm are written/recorded in this file. Images that are included in the matching process but do not have any control measures in common with the MATCH image will be recorded in the TONOTMATCHED filename if given. The following command was used to create the control network of the same two images, excluding the non-overlapping image, as was processed in example 1:
findfeatures algorithm='fastx@threshold:25@type:2/brief/parameters@maxpoints:500' \
match=EW0211981114G.cub \
fromlist=fromlist.lis \
fastgeom=true \
geomtype=camera \
geomsource=both \
fastgeompoints=25 \
epitolerance=3.0 \
ratio=0.99 \
hmgtolerance=3.0 \
globals='FastGeomDumpMapping:true@SaveRenderedImages:true' \
networkid="EW0211981114G_EW0242463603G" \
pointid='EW211981116G_????' \
onet=EW0211981114G.net \
tolist=EW0211981114G_cubes.lis \
tonotmatched=EW0211981114G_notmatched.lis \
tonogeom=EW0211981114G_nogeom.lis \
description='Create image-image control network' \
debug=true \
debuglog=EW0211981114G.debug.log
In this case, since we are matching more than one file, all the files to be matched must be listed, one per line, in the file specified in the FROMFILE, fromlist.lis. Here is the contents of this file: EW0242463603G.cub EW0218118239G.cub There are two additional parameters added in GLOBALS parameter. The parameter FastGeomDumpMapping:true will notify the radial mapping algorithm to dump a CSV file containing the results of the common mapping points generated from the radial pattern. Recall that the radial algorithm produces only one pattern from which it calculates the perspective warping matrix for each image in the FROMLIST. This option generates a file containing the data made up of the basenames of the MATCH and FROMLIST image pairs. In this example, the file EW0211981114G_EW0242463603G.radial.fastgeom.csv is created. Even files that cannot be mapped will have a file generated but they will be empty. This matrix is then applied to the FROMLIST image that is intended to better correspond spatially with the MATCH image. The SaveRenderedImages:true parameter tells findfeatures to save the warped images to a PNG file. This will allow users to evaluate how well the FASTGEOM algorithm performed. This option creates PNG files generated from their base file names, such as EW0211981114G_query.png from the MATCH file and EW0242463603G_train.png from the FROMLIST file name. The processing of FASTGEOM is logged in the DEBUGLOG file if given and DEBUG=true is set. Here is the portion of the log file EW0211981114G.debug.log that is created from the FASTGEOM algorithm:
---------------------------------------------------
Program: findfeatures
Version 1.2
Revision: 2023-06-16
RunTime: 2023-06-19T11:44:03
OpenCV_Version: 4.5.5
System Environment...
Number available CPUs: 8
Number default threads: 8
Total threads: 8
Image load started at 2023-06-19T11:44:03
++++ Running FastGeom ++++
*** QueryImage: EW0211981114G.cub
*** TrainImage: EW0242463603G.cub
FastGeomAlgorithm: radial
FastGeomPoints: 25
FastGeomTolerance: 3
FastGeomQuerySampleTolerance: 0
FastGeomQueryLineTolerance: 0
FastGeomTrainSampleTolerance: 0
FastGeomTrainLineTolerance: 0
--> Using Radial Algorithm train-to-query mapping <--
FastGeomMaximumRadius: 724.077
FastGeomRadialSegmentLength: 25
FastGeomRadialPointCount: 5
FastGeomRadialPointFactor: 1
FastGeomRadialSegments: 29
==> Radial Point Mapping complete <==
TotalPoints: 2031
ImagePoints: 1333
MappedPoints: 1333
InTrainMapFOV: 636
--> Dumping radial points <---
PointDumpFile: EW0211981114G_EW0242463603G.radial.fastgeom.csv
TotalPoints: 1333
==> Geometric Correspondence Mapping complete <==
TotalPoints: 636
--> Running Homography Image Transform <---
IntialPoints: 636
Tolerance: 3
TotalLmedsInliers: 563
PercentPassing: 88.522
MatrixTransform:
0.645981,-0.0158572,113.771
-0.0350108,0.628872,337.353
-8.52086e-05,2.53351e-06,1
++++ Running FastGeom ++++
*** QueryImage: EW0211981114G.cub
*** TrainImage: EW0218118239G.cub
FastGeomAlgorithm: radial
FastGeomPoints: 25
FastGeomTolerance: 3
FastGeomQuerySampleTolerance: 0
FastGeomQueryLineTolerance: 0
FastGeomTrainSampleTolerance: 0
FastGeomTrainLineTolerance: 0
--> Using Radial Algorithm train-to-query mapping <--
FastGeomMaximumRadius: 724.077
FastGeomRadialSegmentLength: 25
FastGeomRadialPointCount: 5
FastGeomRadialPointFactor: 1
FastGeomRadialSegments: 29
==> Radial Point Mapping complete <==
TotalPoints: 2031
ImagePoints: 1333
MappedPoints: 0
InTrainMapFOV: 0
--> Dumping radial points <---
PointDumpFile: EW0211981114G_EW0218118239G.radial.fastgeom.csv
TotalPoints: 0
==> Geometric Correspondence Mapping complete <==
TotalPoints: 0
>>>> ERROR - Failed to get FOV geometry mapping for EW0218118239G.cub to EW0211981114G.cub needing 25 but got 0 in train FOV.
Failed to load EW0218118239G.cub
Image load complete at 2023-06-19T11:44:04
Total failed image loads/FastGeoms excluded: 1
EW0218118239G.cub
See also EW0211981114G_nogeom.lis
Total Algorithms to Run: 1
@@ matcher-pair started on 2023-06-19T11:44:04
Note that an error is shown for the file EW0218118239G.cub. This is because no common points were found for this file and the MATCH file, EW0211981114G. Using the "keyword:value" pairs in the GLOBALS parameters, the results can be analyzed as shown in the panel below. The plot in the lower left corner of the panel shows the results of the FASTGEOM Radial parameter geometry mapping of common/cooresponding points of the MATCH and FROM image. The points in red are outside the FROM image FOV and do not contribute to the computation of the homography matrix for the perspective warp for spatial consistency with the MATCH image. The blue points are the ones used in to produce the homography matrix. The image in the lower right corner is the result of the warp of the FROM image. 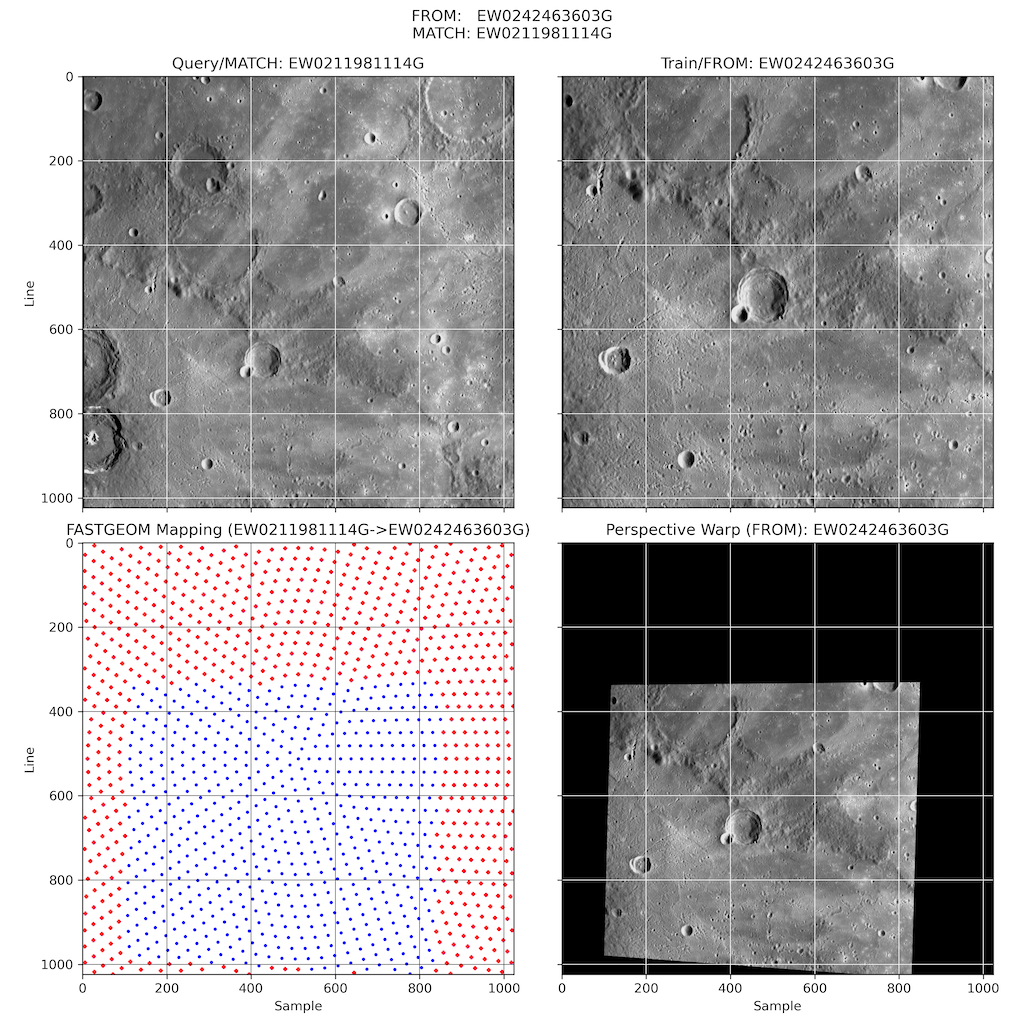
The network produced from this example contains 145 control points and with two measures each (290). This screen shot shows the resulting network. The pointreg application should be run on this network to refine the control measures to sub-pixel accuracy. 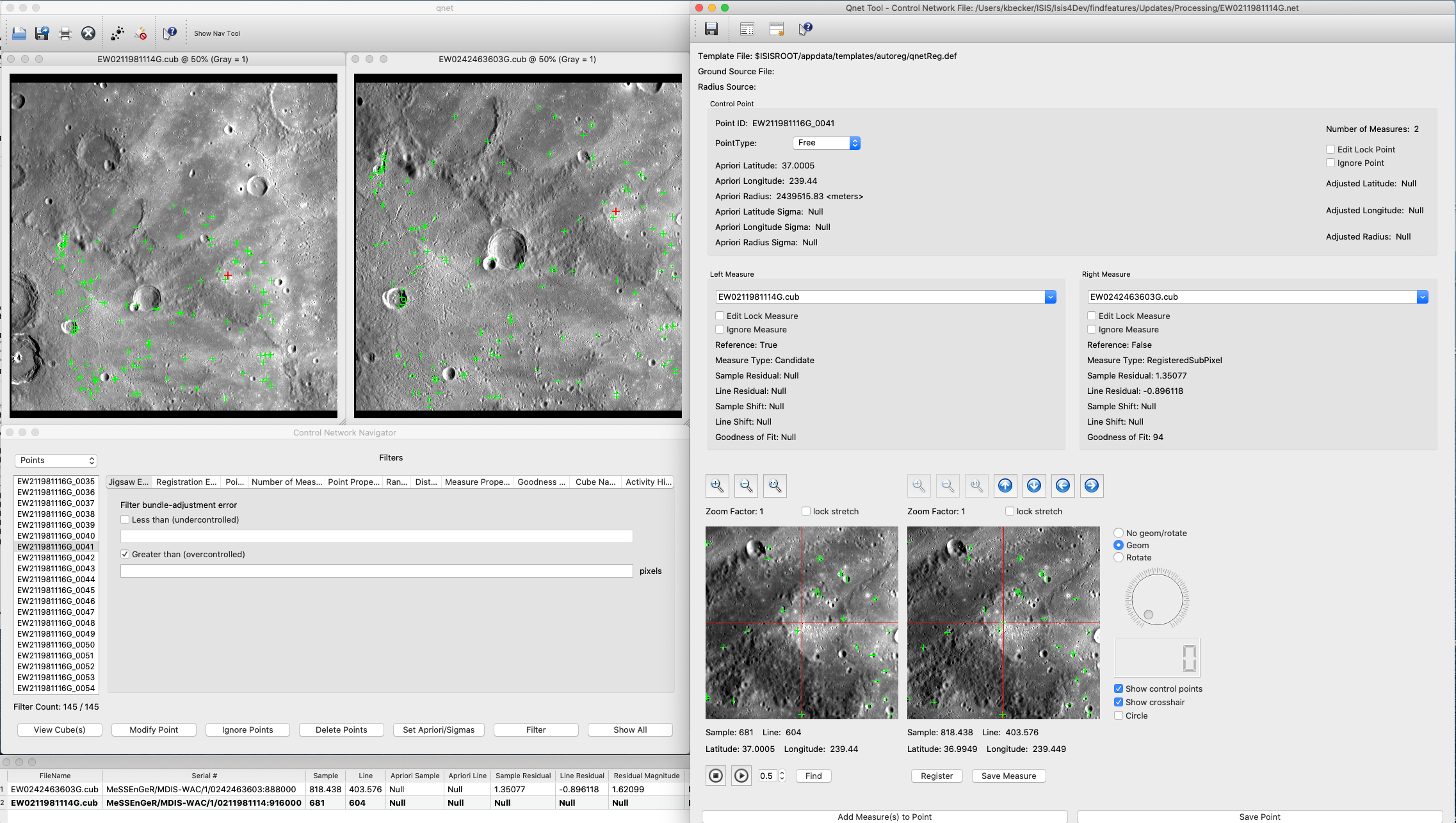
|
Example 4Create a controlled mosaic using findfeatures DescriptionOverviewThis example shows the results of a comprehensive processing sequence that produces a controlled mosaic using findfeatures. The data used for this mosaic is MESSENGER MDIS NAC and WAC EDR images of Mercury taken from the MESSENGER MDIS PDS archive. These EDRs are ingested into ISIS and standard processing is then applied producing the regional controlled mosaic using findfeatures. The EDR images used for this example are:
EN0108828436M.IMG
EN0108828483M.IMG
EN0108828488M.IMG
EN0217733143M.IMG
EN0217733334M.IMG
EN0218118182M.IMG
EW0215590428G.IMG
EW0218075871G.IMG
EW0218118239G.IMG
It is important to recognize the procedures applied here are effective under limited conditions. Namely, all the images included here have some common overlap with the carefully chosen MATCH image. Adding additional images that do not overlap the MATCH image will be excluded by findfeatures and requires additional steps that utilize techniques outside the scope of this example. It would involve repeatedly running findfeatures where every image is used as the MATCH image and all other images are included in the FROMLIST (with common ground coverage) and the resulting image-based networks are combined into a single network. This technique is also used for larger, global networks that frequently have images with largely varying resolutions and observing conditions. This technique has successfully been used to create global networks for Mercury using MESSENGER MDIS images and Bennu using OSIRIS-REx OCAMS images. Making a Controlled Mosaic with findfeaturesThe MESSENGER NAC and WAC images must be processed with the ISIS application processing sequence of mdis2isis, spiceinit, mdiscal, camstats and footprintinit. This will prepare the images for findfeatures which will create an image-based network. The findfeatures command used on these nine images which performs image matching and creates the network is:
base="EW0218118239G"
findfeatures algorithm='fastx@threshold:25@type:2/brief/parameters@Maxpoints:7000' \
match="${base}.cal.cub" \
fromlist=fromlist.lis \
fastgeom=true \
geomtype=camera \
geomsource=both \
fastgeompoints=50 \
epitolerance=7.0 \
ratio=0.99 \
hmgtolerance=7.0 \
globals='FastGeomDumpMapping:true@SaveRenderedImages:true@FastGeomAlgorithm:grid' \
networkid="${base}_Mosiac" \
pointid="${base}_????" \
onet="${base}.net" \
tolist="${base}_cubes.lis" \
tonotmatched="${base}_notmatched.lis" \
tonogeom="${base}_nogeom.lis" \
description='Create MESSENGER MDIS image-image control network' \
debug=true \
debuglog="${base}.debug.log"
There are several things to note. The maximum number of points to retain from each image is limited in the detector (7000) as specified in the "/parameter" section of the algorithm specification. The fastx detector will very frequently produce a significant number of keypoints. This may seem like a lot of keypoints per image pair, but is likely a good choice for some images sets that contain different pixel resolutions or largely varying observation conditions like what is seen in this dataset. We are using the FASTGEOM Grid algorithm (specified in the GLOBALS program option) because the default Radial will have a difficult time meeting the minimum number of FASTGEOMPOINTS points due to large variations in pixel resolutions. The transformed files are retained so the FASTGEOM performance can be evaluated. The HMGTOLERANCE and EPITOLERANCE are both set to 7 pixels to account for uncertainty in SPICE data and distortions in the translated images due to the linear nature of the perspective warp transform caused by topography differences (which should be accounted for in an ensuing run of pointreg in the definition file by setting the size of the SearchChip to be larger that twice the size of the tolerances). We expect no files in the TONOGEOM and TONOTMATCHED because no such problems exist in this example. And you should have a look at the output DEBUGLOG file for detailed performance and behavior information for findfeatures that may indicate the need for adjustments of the matching parameters. The MATCH image, EW0218118239G, was carefully chosen in this dataset because it has common ground coverage/overlap with all the other eight MDIS images. qmos is most helpful to determine this image as a MATCH candidate as is shown in this screen shot. Image EW0218118239G is the one outlined with the dashed square. It is clear there are images with largely varying pixel resolutions. Users will be able to select any image by changing the "base" variable in prior to the execution of findfeatures. 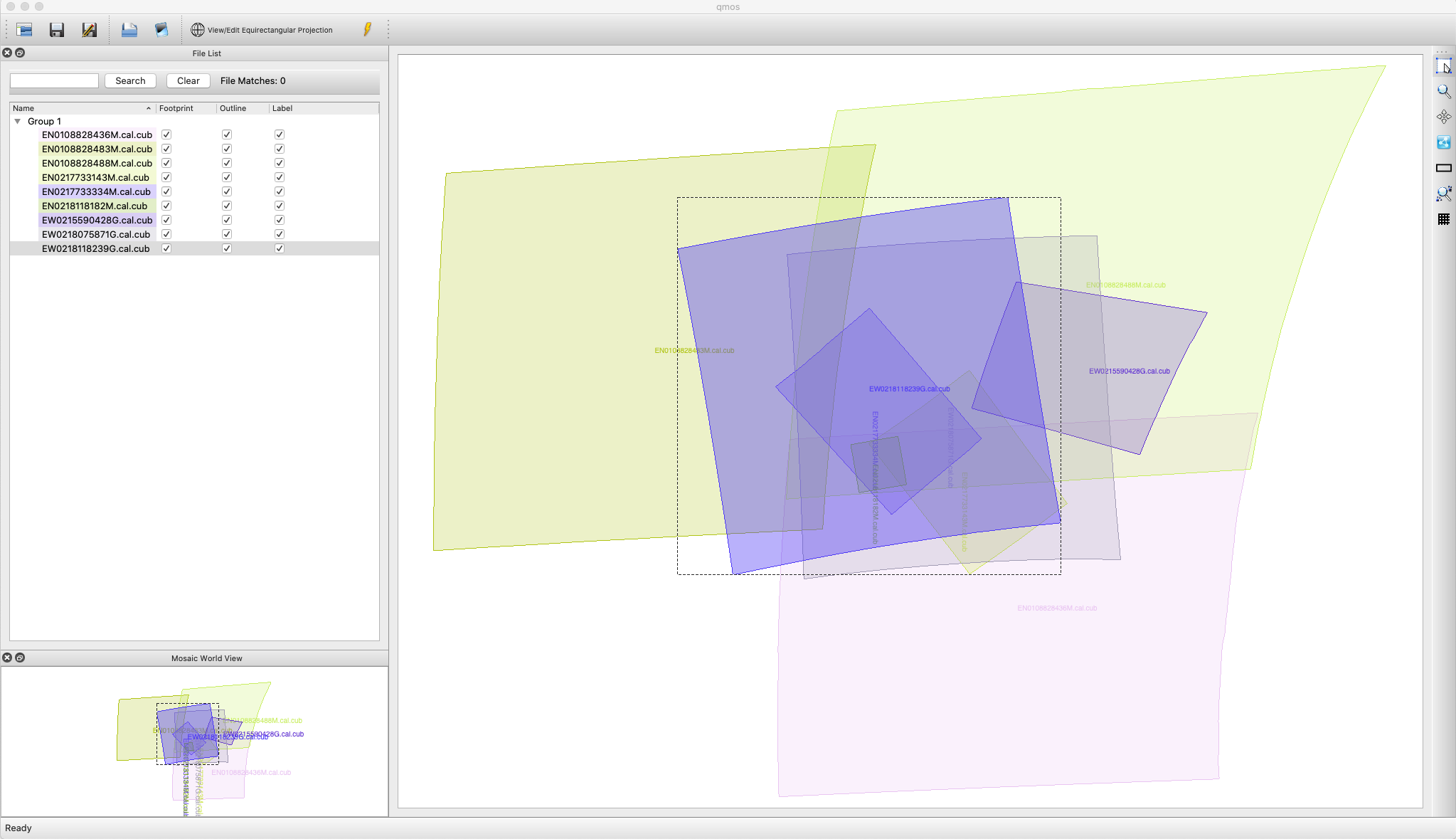
The control network created by findfeatures is an image-based network. This type of network will contain no points outside the FOV of the MATCH image. In most cases when building a larger network, a single image-based network is insufficient to produce a large connected network, so successive runs of findfeatures using different MATCH files is required. This image-based network contains 3940 control points. The best networks will have the deepest control points (i.e., contains many measures that includes all images matched). Typically this is not realistic so additional options can be considered. For example, success in jigsaw is greatly increased by the quality of the control points/measures. The pointreg application is used to refine control measures in the output network produced by findfeatures to sub-pixel accuracy. This step is where this result can be achieved by setting a high Tolerance in the Algorithm group of the REGDEF file. For great control points, use Tolerance = 0.9, which is what was used in this example. The network produced by findfeatures initially resulted in 4646 control points with 12,203 control measures with a maximum of 7 control measures in a control point. However, the average number of measures was 2.6, which indicates the majority of control points contain 2-3 measures - not so great. However, looking carefully at the qmos data, there is not much potential for deeper control points because of limited overlapping images. To increase this number you can further increase HMGTOLERANCE and EPITOLERANCE, or choose a different set of matching algorithms. After pointreg, 3940 control points with 8338 control measures remain, an average of 2.116 measures/point. This is pretty good considering how high the Tolerance was set. The other thing to consider is the distribution of the points. The screen shot below shows the point distribution and density for each image. Given the minimum coverage of many of the images, this will work - or at least be worth producing a mosaic for evaluation. 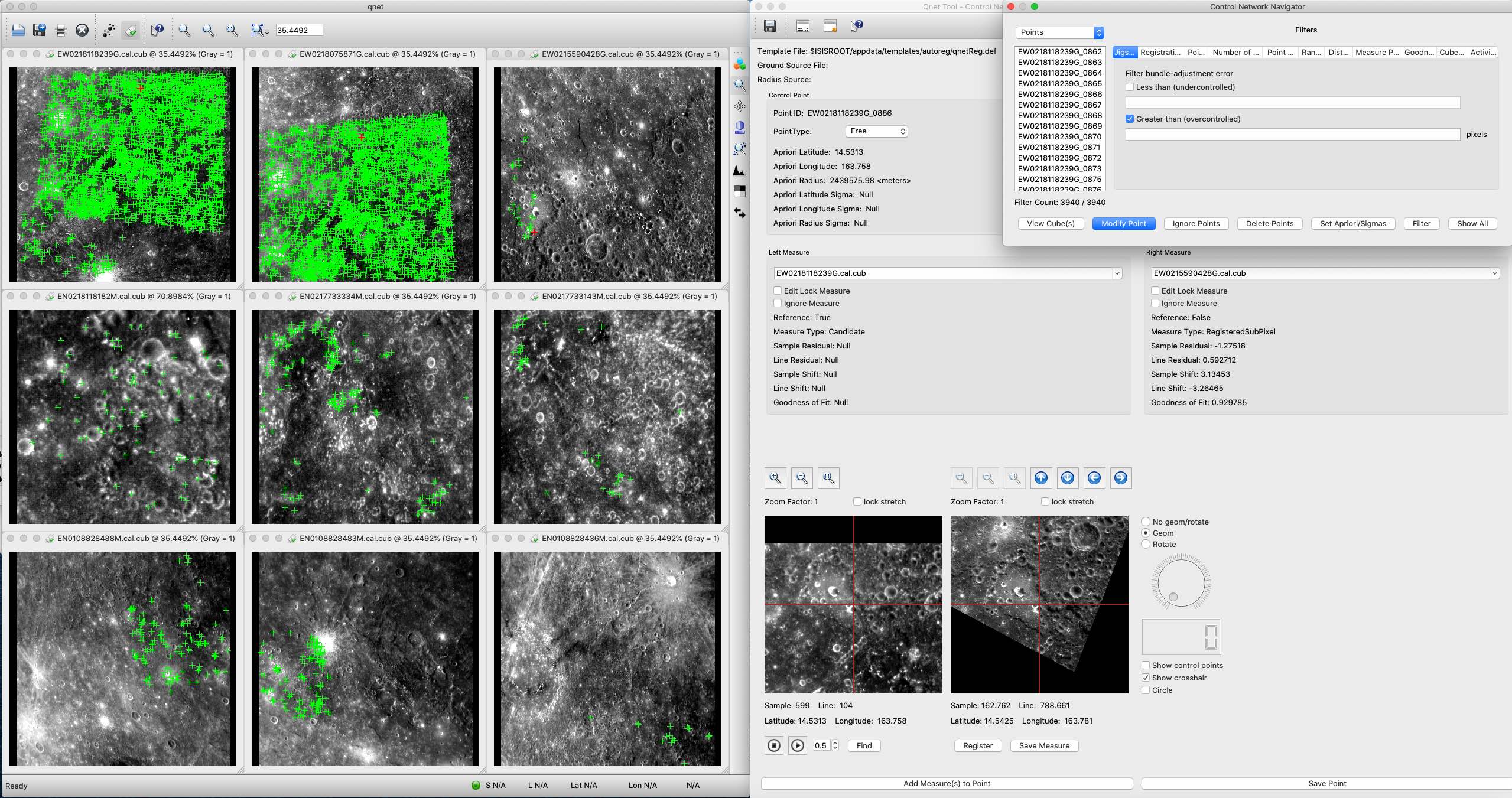
Producing a mosaic is the best way to assess the quality of the network. It is recommended to create both an uncontrolled and controlled mosaic to visually inspect/compare with qview or an alternative image viewer. The screen shot below shows a portion of the two mosaics. One important thing to note is this example does not control to a ground truth source. There are at least several ways to control your mosaic to ground truth but that is outside the scope of this example (and they are typically a great deal of work!). With that said, the spacecraft position serves as our "ground truth" but you may also see the MATCH image will have the least adjustment because it is highly biased since it has the most control measures. 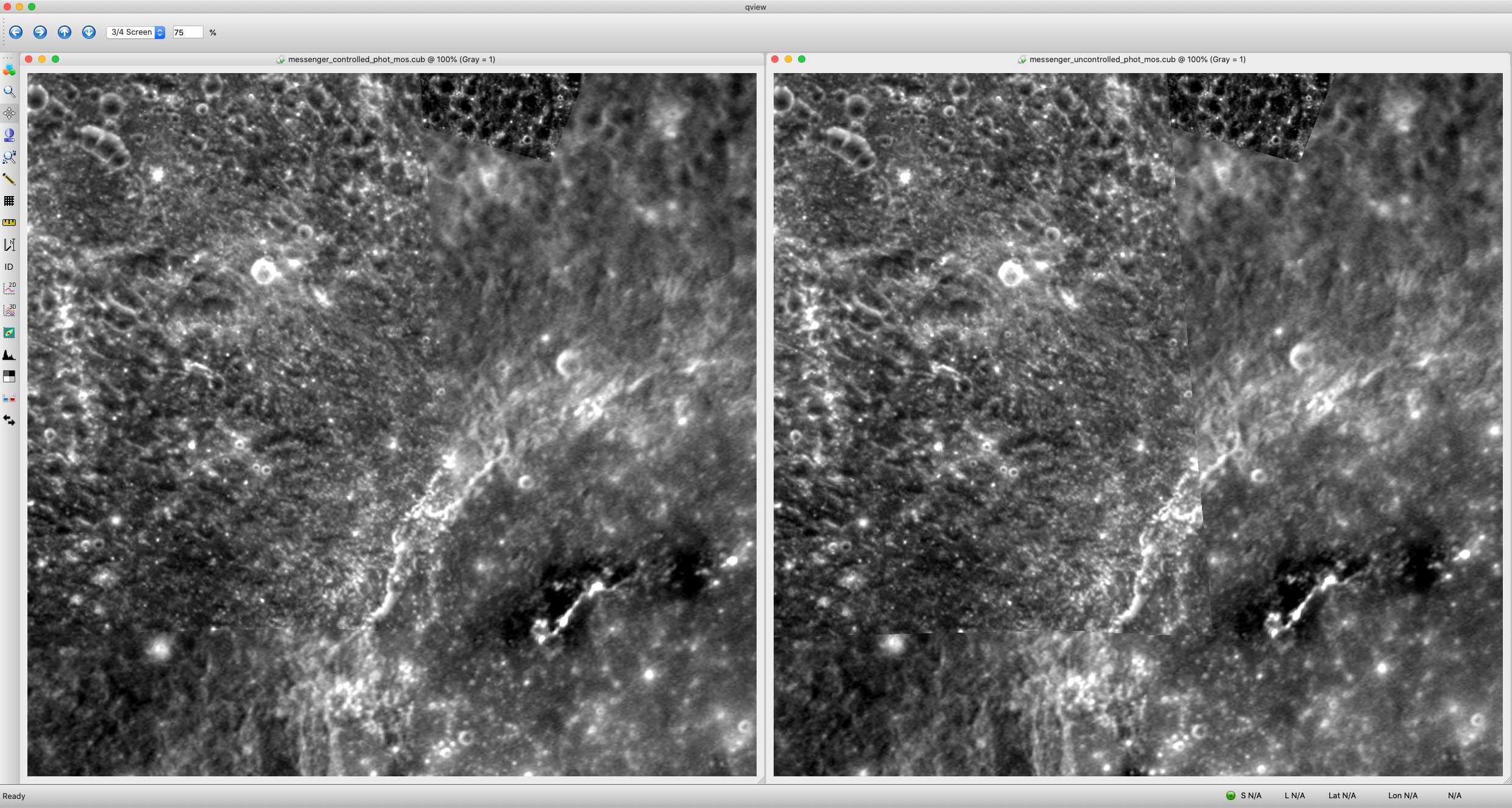
|