

map2cam
Convert map projected image to a raw camera image
The main purpose of this program is to facilitate control point selection between a level1 cube and a base map. The MATCH image and the resulting TO file can be opened in the program qnet along with other level1 cubes for building a control network with ties to ground.
Categories
Related Applications to Previous Versions of ISIS
This program replaces the following applications existing in previous versions of ISIS:- lev2tolev1
- base2l1
- base
History
| Kay Edwards | 1987-09-02 | Original version |
| Jeff Anderson | 2003-06-06 | Converted to Isis 3.0 |
| Jacob Danton | 2005-12-05 | Fixed a bug in BandChange, added appTest |
| Elizabeth Miller | 2006-03-23 | Fixed appTest to reflect changes made to all camera models |
| Steven Lambright | 2006-06-22 | Fixed typo in user documentation |
| Steven Lambright | 2008-05-13 | Removed references to CubeInfo |
| Lynn Weller and Debbie A. Cook | 2012-01-17 | Updated documentation text, added glossary links, and improved compatability with Isis documentation. |
| Travis Addair | 2012-04-23 | SPICE tables are now propagated from the MATCH cube to the output. |
| Debbie A. Cook | 2012-12-06 | Changed to use TProjection instead of Projection. References #775 |
| Steven Lambright | 2013-02-12 | Fixed an issue that caused this program to trim output images erroneously. This problem, and the recommended solution, was provided by Jeff Anderson. Fixes #984. |
Parameters
Files
| Type | cube |
|---|---|
| File Mode | input |
| Filter | *.cub |
| Type | cube |
|---|---|
| File Mode | input |
| Filter | *.cub |
| Type | cube |
|---|---|
| File Mode | output |
| Filter | *.cub |
Options
| Type | string | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Default | CUBICCONVOLUTION | ||||||||||||
| Option List: |
|
Example 1
Typical usage
Command Line
map2cam
from=M10_Equi_1000meters_Clon180.cub
match=EN0108821402M.cal.cub
to=M10_match_EN0108821402M.cub interp=CUBICCONVOLUTION
GUI Screenshot
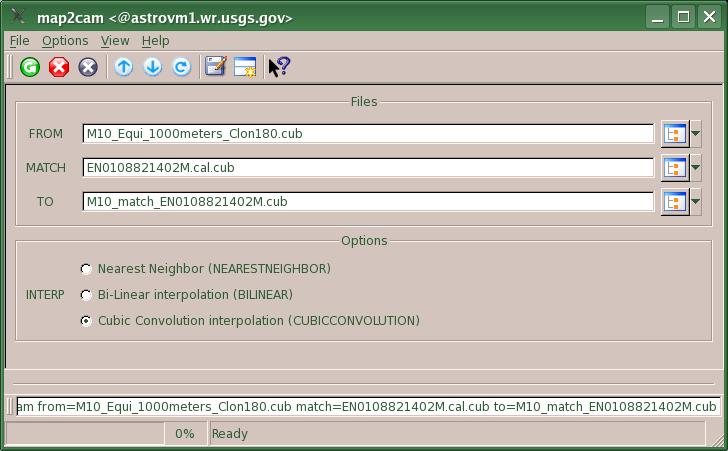
Example GUI
Screen shot of GUI with parameters filled in to create a level 1 version of a base map for selecting control in a Messenger image.
Input Images
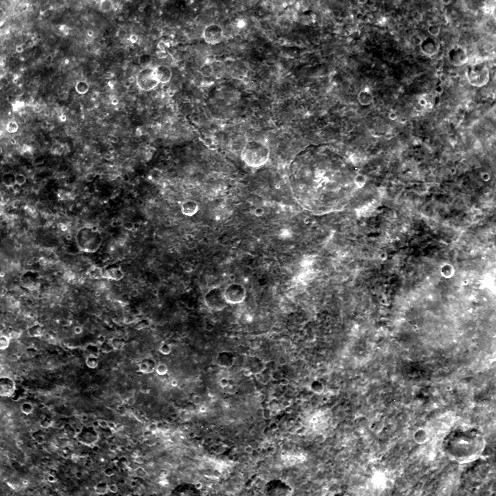
Input level 2 image (map)
Basemap image from Mariner 10
Parameter Name:
FROM
This is the image that will be mapped into a level 1 image using the geometry of the MATCH image.

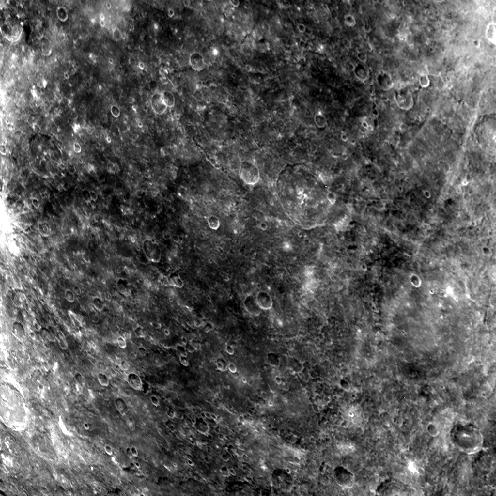
Image to match
Messenger image to match
Parameter Name:
MATCH
The geometry of this image will be used to create the level 1 version of the FROM image, which will be output as the TO image.
Output Image
Output image
Mariner 10 basemap mapped into Messenger level 1 space
Parameter Name:
TO
The level 1 version of the FROM image