|
| virtual QString | AlgorithmName () const |
| | Return name of Algorithm.
|
| |
| int | algorithm (Chip &pattern, Chip &subsearch, const Radiometric &radio, BigInt &ptsUsed, double &resid, GMatrix &atai, AffineRadio &affrad) |
| | Real workhorse of the computational Gruen algorithm.
|
| |
| Analysis | errorAnalysis (const BigInt &npts, const double &resid, const GMatrix &atai) |
| | Compute the error analysis of convergent Gruen matrix.
|
| |
| virtual double | MatchAlgorithm (Chip &pattern, Chip &subsearch) |
| | Minimization of data set using Gruen algorithm.
|
| |
| virtual bool | CompareFits (double fit1, double fit2) |
| | This virtual method must return if the 1st fit is equal to or better than the second fit.
|
| |
| virtual double | IdealFit () const |
| | Returns the ideal fit for a perfect Gruen result.
|
| |
| virtual AutoReg::RegisterStatus | Registration (Chip &sChip, Chip &pChip, Chip &fChip, int startSamp, int startLine, int endSamp, int endLine, int bestSamp, int bestLine) |
| | Applies the adaptive Gruen algorithm to pattern and search chips.
|
| |
| virtual Pvl | AlgorithmStatistics (Pvl &pvl) |
| | Create Gruen error and processing statistics Pvl output.
|
| |
| void | SetChipSample (double sample) |
| | Sets the search chip subpixel sample that matches the pattern tack sample.
|
| |
| void | SetChipLine (double line) |
| | Sets the search chip subpixel line that matches the pattern tack line.
|
| |
| void | SetGoodnessOfFit (double fit) |
| | Sets the goodness of fit for adaptive algorithms.
|
| |
| void | Parse (Pvl &pvl) |
| | Initialize parameters in the AutoReg class using a PVL specification.
|
| |
| bool | SetSubpixelPosition (Chip &window) |
| | Set the search chip sample and line to subpixel values if possible.
|
| |
| Chip | Reduce (Chip &chip, int reductionFactor) |
| | This method reduces the given chip by the given reduction factor.
|
| |
|
| QString | ConfKey (const DbProfile &conf, const QString &keyname, const QString &defval, int index=0) const |
| | Helper method to initialize parameters.
|
| |
| template<typename T> |
| T | ConfKey (const DbProfile &conf, const QString &keyname, const T &defval, int index=0) const |
| | Helper method to initialize parameters.
|
| |
| template<typename T> |
| PvlKeyword | ParameterKey (const QString &keyname, const T &value, const QString &unit="") const |
| | Keyword formatter for Gruen parameters.
|
| |
| PvlKeyword | ValidateKey (const QString keyname, const double &value, const QString &unit="") const |
| | Checks value of key, produces appropriate value.
|
| |
| ErrorList | initErrorList () const |
| | Creates an error list from know Gruen errors.
|
| |
| int | logError (int gerrno, const QString &gerrmsg) |
| | Logs a Gruen error.
|
| |
| PvlGroup | StatsLog () const |
| | Create a PvlGroup with the Gruen specific statistics.
|
| |
| PvlGroup | ParameterLog () const |
| | Create a PvlGroup with the Gruen specific parameters.
|
| |
| void | init (Pvl &pvl) |
| | Initialize the object.
|
| |
| Radiometric | getDefaultRadio () const |
| | Returns the default radiometric gain value.
|
| |
| double | DegreesOfFreedom (const int npts) const |
| | Returns number of degrees of freedom of points.
|
| |
| void | resetStats () |
| | Reset Gruen statistics as needed.
|
| |
| GMatrix | Identity (const int &ndiag=3) const |
| |
| GMatrix | Choldc (const GMatrix &a, GVector &p) const |
| | Compute Cholesky solution.
|
| |
| GMatrix | Cholsl (const GMatrix &a, const GVector &p, const GMatrix &b, const GMatrix &x) const |
| | Compute Cholesky solution matrix from correlation.
|
| |
| int | Jacobi (const GMatrix &a, GVector &evals, GMatrix &evecs, const int &MaxIters=50) const |
| | Compute the Jacobian of a covariance matrix.
|
| |
| void | EigenSort (GVector &evals, GMatrix &evecs) const |
| | Sort eigenvectors from highest to lowest.
|
| |
| BigInt | MinValidPoints (BigInt totalPoints) const |
| | Computes the number of minimum valid points.
|
| |
| bool | ValidPoints (BigInt totalPoints, BigInt nPoints) const |
| | Determines if number of points is valid percentage of all points.
|
| |
| int | CheckConstraints (MatchPoint &point) |
| | Test user limits/contraints after the algorithm has converged.
|
| |
| Coordinate | getChipUpdate (Chip &sChip, MatchPoint &point) const |
| | Compute the chip coordinate of the registered pixel.
|
| |
| AutoReg::RegisterStatus | Status (const MatchPoint &result) |
| | Returns the proper status given a Gruen result container.
|
| |
| void | Match (Chip &sChip, Chip &pChip, Chip &fChip, int startSamp, int endSamp, int startLine, int endLine) |
| | Empty copy constructor.
|
| |
| bool | ComputeChipZScore (Chip &chip) |
| | This method computes the given Chip's Z-Score.
|
| |
| void | Init () |
| | Initialize AutoReg object private variables.
|
| |
| void | ApplyGradientFilter (Chip &chip) |
| | Run a gradient filter over the chip.
|
| |
| void | SobelGradient (Buffer &in, double &v) |
| | Compute a Sobel gradient based on an input buffer.
|
| |
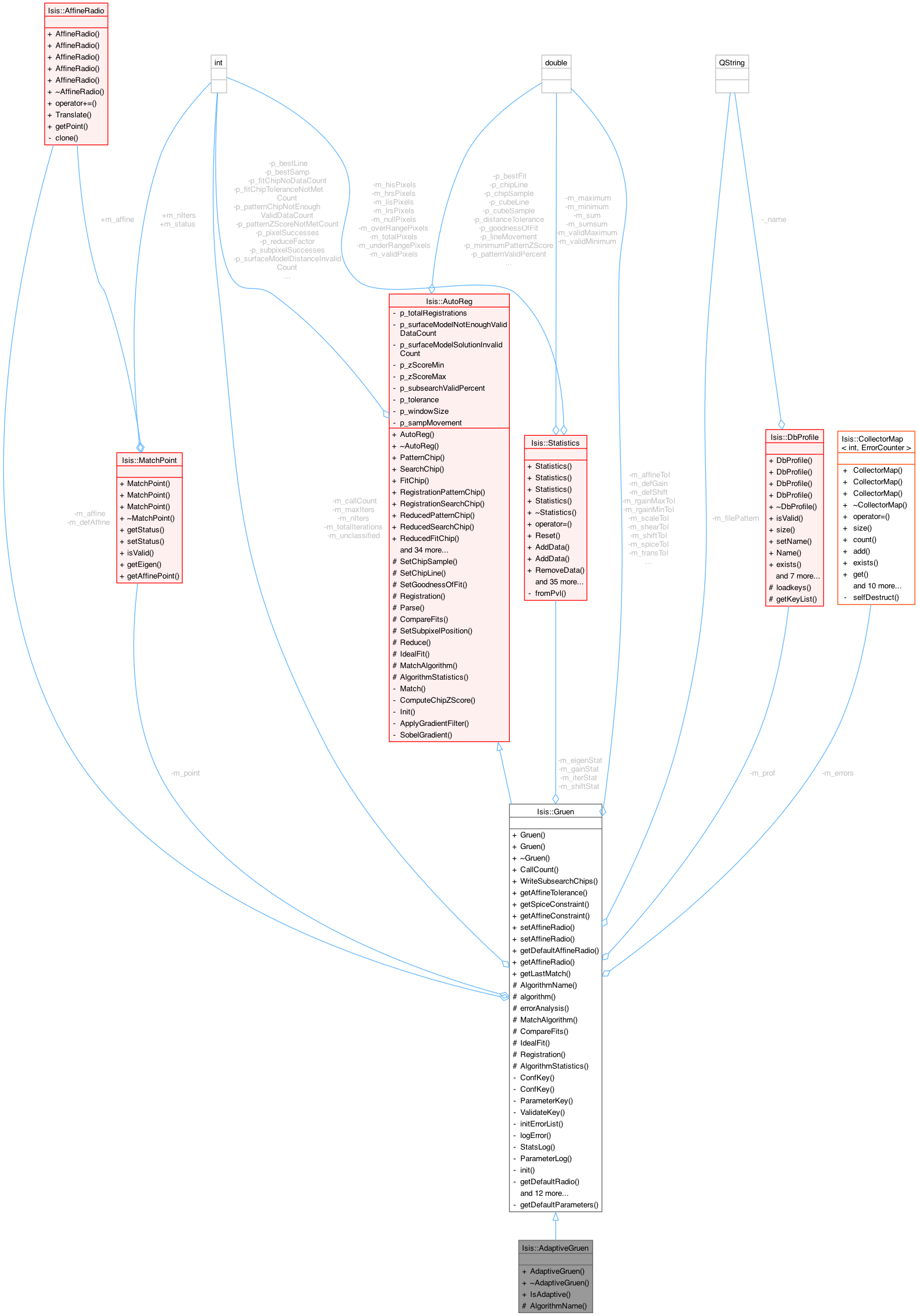
Gruen (adaptive) pattern matching.
The AdaptiveGruen pattern/search chip registration algorithm is derived from the Gruen class. It is adaptive in that it uses an Affine transform to load the subsearch chip from the search chip. The Affine transform is iteratively minimized to converge on an cummulative affine solution that best matches the pattern chip.
- See also
- Gruen AutoReg MinimumGruen
- Author
- 2009-09-09 Kris Becker
- History
- 2017-06-28 Makayla Shepherd - Updated documentation. References #4807.
Definition at line 35 of file AdaptiveGruen.h.
Real workhorse of the computational Gruen algorithm.
This method is called for all registration requests and actually performs the registration of two chips.
The pattern chip is deemed constant. The subsearch chip is generally an extraction from the search chip that has had an affine transform applied to fill it.
At each iteration of the Gruen algorithm, the affine transform is incrementally updated based upon the results from this method. There are six affine parameters and two radiometric (shift and gain) parameters that are solved/computed here.
The algorithm itself is a first derivative computation of the subsearch chip with small radiometric adjustments applied to better tone match the two chips. This is intended to minimize the affine variability.
- Parameters
-
| pattern | Fixed pattern chip which subsearch is trying to match |
| subsearch | Affined extraction of the search chip |
- Returns
- Returns 0 if successful, otherwise returns the error number associated with the problem encountered (see ErrorTypes)
Definition at line 156 of file Gruen.cpp.
References Choldc(), Cholsl(), Isis::Chip::GetValue(), Isis::Chip::IsValid(), Isis::Chip::Lines(), logError(), MinValidPoints(), Isis::Chip::Samples(), Isis::Chip::TackLine(), Isis::Chip::TackSample(), Isis::IException::toString(), and ValidPoints().
Referenced by MatchAlgorithm(), and Registration().
| int Isis::Gruen::CheckConstraints |
( |
MatchPoint & | point | ) |
|
|
privateinherited |
Test user limits/contraints after the algorithm has converged.
This method is invoked immediately after the Gruen algorithm has converged to test against user specified limits. This call is only valid in the adaptive context as much of the error checking is handled by AutoReg when using the non-adaptive algorithm.
This method tests for convergence, maximum iterations exceeded, tolerance limits of radiometric shift and gain and whether the eigenvalue of the solution exceeds the limit.
The result container is altered should a constraint not be meet which indicates the registration failed.
- Parameters
-
| point | Container with point information |
- Returns
- int Returns the status of the point. If all constraints tests are valid, 0 is return, otherwise returns error number.
Definition at line 1090 of file Gruen.cpp.
References getAffineConstraint(), Isis::MatchPoint::getAffinePoint(), Isis::Coordinate::getDistance(), logError(), and Isis::AutoReg::Tolerance().
Referenced by Registration().
| double Isis::Gruen::MatchAlgorithm |
( |
Chip & | pattern, |
|
|
Chip & | subsearch ) |
|
protectedvirtualinherited |
Minimization of data set using Gruen algorithm.
This is a very minimal application of the Gruen algorithm that provides the ability to use it in a non-adaptive capacity. This method processes two chips of the same size, pattern and subsearch. The subsearch has typically been extracted in the same manner as the MinimumDifference or MaximumCorrelation routines are utilized.
It simply applies the algorithm to the current state of the two chips, computes the error analysis on it and returns the eigen vector solution as an indication of chip registration integrity.
Note that in this mode, most all the parameters found in the definition file that apply to the adaptive mode are ignored when utilizing the algorithm in this fashion.
- Parameters
-
| pattern | [in] A Chip object usually containing an nxm area of a cube. Must be the same diminsions as subsearch. |
| subsearch | [in] A Chip object usually containing an nxm area of a cube. Must be the same dimensions as pattern. This is normally a subarea of a larger portion of the image. |
- Returns
- The square root of the eigen values of DN differences OR Isis::NULL if the Gruen algorithm fails.
Implements Isis::AutoReg.
Definition at line 608 of file Gruen.cpp.
References algorithm(), errorAnalysis(), getDefaultRadio(), Isis::Analysis::getEigen(), and Isis::Null.
Walk the pattern chip through the search chip to find the best registration.
- Returns
- AutoReg::RegisterStatus Returns the status of the registration.
- Exceptions
-
| iException::User | - "Search chips samples must be at least N pixels
wider than the pattern chip samples for successful surface modeling" |
| iException::User | - "Search chips lines must be at least N pixels
taller than the pattern chip lines for successful surface modeling" |
| iException::User | - "Reduction factor is too large" |
Prep for walking the search chip by computing the starting and ending sample and line positions of the search chip to extract a sub-search chip to compare with the pattern chip.
Because the sub-search chip needs to have the same pixel dimensions as the pattern chip, and will be composed from its center pixel outwards, buffer the start and end boundaries so an area the size of the pattern chip can always be extracted around the current position.
For example, consider trying to extract a 5x5 sub-search chip from some search chip. If one starts at sample 1 and line 1, then because the "current position" is treated as the center of the sub-search chip, the algorithm could not form a 5x5 chip because there is nothing up and to the left of the current position. Consequently, for this example, there needs to be a two-pixel buffer from the edge of the search chip as the algorithm walks through it to make sure a 5x5 sub-search chip can always be extracted with the current position as its center.
Definition at line 587 of file AutoReg.cpp.
References ApplyGradientFilter(), ComputeChipZScore(), Isis::Chip::CubeLine(), Isis::Chip::CubeSample(), FitChipNoData, Init(), Isis::Chip::IsValid(), Isis::Chip::Lines(), Match(), None, Isis::Null, p_bestFit, p_bestLine, p_bestSamp, p_chipLine, p_chipSample, p_cubeLine, p_cubeSample, p_fitChip, p_fitChipNoDataCount, p_goodnessOfFit, p_gradientFilterType, p_gradientPatternChip, p_gradientSearchChip, p_patternChip, p_patternChipNotEnoughValidDataCount, p_patternValidPercent, p_patternZScoreNotMetCount, p_pixelSuccesses, p_reducedFitChip, p_reducedPatternChip, p_reducedSearchChip, p_reduceFactor, p_registrationStatus, p_searchChip, p_subpixelSuccesses, p_totalRegistrations, p_windowSize, PatternChipNotEnoughValidData, PatternZScoreNotMet, Reduce(), Registration(), Isis::Chip::Samples(), Isis::Chip::SetChipPosition(), Success(), SuccessSubPixel, Isis::Chip::TackLine(), Isis::Chip::TackSample(), and Isis::IException::User.
Referenced by Isis::SmtkMatcher::makeRegisteredPoint().
| AutoReg::RegisterStatus Isis::Gruen::Registration |
( |
Chip & | sChip, |
|
|
Chip & | pChip, |
|
|
Chip & | fChip, |
|
|
int | startSamp, |
|
|
int | startLine, |
|
|
int | endSamp, |
|
|
int | endLine, |
|
|
int | bestSamp, |
|
|
int | bestLine ) |
|
protectedvirtualinherited |
Applies the adaptive Gruen algorithm to pattern and search chips.
This method computes the adaptive Gruen algorithm for a pattern chip and search chip. The search chip is assumed to be of a larger size than the pattern chip as dictated by the contents of the registration definition file.
This algorithm can be used with or without "fast geoming" the search chip. It works quite well where the two images are assumed to be nearly spatially registered. Its real intent is to compute parallax angles between two images taken at different viewing geometry. This provides an efficient process for deriving a digital elevation model (DEM) from two datasets.
The Gruen algorithm is applied to the chips until the algorithm converges (current iteration yields a detla affine within tolerance limits), an error is encountered, or the maximum number of iterations is exceeded.
Note that bestSamp and bestLine may not be the original center of the search chip. It is subject to chip reduction matching as specified by the user. All distance tolerances are compute from this postion. The process of chip reduction processing is handled by AutoReg prior to calling this routine.
- See also
- getThreshHold() for Affine limit information
- Parameters
-
| sChip | Full search chip as rendered from the search image |
| pChip | Full pattern chip as rendered from the pattern/match image |
| fChip | Maintains the solution vector at each chip location |
| startSamp | Starting sample of the search image range |
| startLine | Starting line of the search image range |
| endSamp | Ending sample of the search image range |
| endLine | Ending line of the search image range |
| bestSamp | Best registering sample of search chip |
| bestLine | best registering line of search chip |
- Returns
- AutoReg::RegisterStatus Returns AutoReg::Success if the chip is successfully registered, otherwise returns AutoReg::AdaptiveAlgorithmFailed.
Reimplemented from Isis::AutoReg.
Definition at line 680 of file Gruen.cpp.
References algorithm(), CheckConstraints(), errorAnalysis(), Isis::Chip::Extract(), getAffineTolerance(), getChipUpdate(), Isis::Threshold::hasConverged(), Isis::Chip::Lines(), logError(), Isis::Chip::Samples(), Isis::AutoReg::SetChipLine(), Isis::Chip::SetChipPosition(), Isis::AutoReg::SetChipSample(), Isis::AutoReg::SetGoodnessOfFit(), Isis::Chip::SetSize(), Status(), Isis::Chip::TackLine(), Isis::Chip::TackSample(), Isis::AffineRadio::Translate(), and Isis::Chip::Write().
| void Isis::AutoReg::SetPatternValidPercent |
( |
const double | percent | ) |
|
|
inherited |
Set the amount of data in the pattern chip that must be valid.
For example, a 21x21 pattern chip has 441 pixels. If percent is 75 then at least 330 pixels pairs must be valid in order for a comparision between the pattern and search sub-region to occur. That is, both the pattern pixel and search pixel must be valid to be counted. Pixels are considered valid based on the min/max range specified on each of the Chips (see Chip::SetValidRange method).
If the pattern chip reduction option is used this percentage will apply to all reduced patterns. Additionally, the pattern sampling effects the pixel count. For example if pattern sampling is 50% then only 220 pixels in the 21x21 pattern are considered so 165 must be valid.
If this method is not called, the PatternChip ValidPercent defaults to 50 in the AutoReg object constructor.
- See also
- SetValidRange()
- Parameters
-
| percent | Percentage of valid data between 0 and 100, default is 50% if never invoked |
- Exceptions
-
| iException::User | - "Invalid value for PatternChip ValidPercent." |
Definition at line 339 of file AutoReg.cpp.
References p_patternValidPercent, and Isis::IException::User.
Referenced by AutoReg(), Parse(), and RegTemplate().
| void Isis::Gruen::WriteSubsearchChips |
( |
const QString & | pattern = "SubChip" | ) |
|
|
inherited |
Set up for writing subsearch for a a given registration call.
This method is provided to request the write of the subsearch chip at each iteration. This must be invoked prior to every call to AutoReg::Register() method. It will only write subchips from the Register() interface as it interates to a solution. Direct calls to Gruen methods don't iterate in the same fashion.
The "pattern" parameter is optional but is provided to direct the location and naming convention of each subsearch chip. The format for the output file name for each subsearch chip is comprised of the pattern parameter, call number, which can be retrieved by the CallCount() method and pertains to the call after the Register() method is invoked and the interation count. Below is a code example:
gruen.WriteSubsearchChips("/mydata/subchip");
gruen.Register();
Gruen()
Default constructor.
Note that prior to each call to Register(), it must be called again in order for the subchips to be written. The last part of the parameter above, "subchip", cannot be a directory, but is a filename prefix. Assuming this is the first call to Register(), a series of cube subsearch chips will be written with the pattern "/work1/kbecker/subchipC000001IXXX.cub" where "C" indicates call count and the next 6 digits are the return of CallCount() method, "I" indicates the iteration count "XXX" of the algorithm() method. Note that the chip written for a particular iteration is what is provided as a parameter into the algorithm() method.
- Parameters
-
| pattern | Specifies an optional directory and file pattern to write the subsearch chip at each algorithm iteration. |
Definition at line 92 of file Gruen.cpp.