ISIS 3 Application Documentation
map2map | Standard View | TOC | Home |
Modify a cube's map projection
Description
Categories
Groups
Examples
History
Description
1. Converting from Sinusodial to Mercator or any other
supported projection
2. No projection change but altering projection parameters
such as center longitude or standard parallels
3. No projection change but altering pixel resolution
4. No projection change but altering latitude/ longitude window
5. No projection change but altering latitude types,
longitude domains, or longitude direction
6. Match the mapping parameters of another ISIS leve2 cube for
comparison.
If you need to generate your own map file you can use the maptemplate program or alternatively, hand create a file using your favorite editor. The map file need only specify the ProjectionName as defaults will be computed for the remaining map file parameters.
The map file can be an existing map projected (level2) cube. A level2 cube has PVL labels and contains the Mapping group. Depending on the values of the input parameters, the output cube can use some or all of the keyword values of the map file. For instance, setting MATCHMAP = true causes all of the mapping parameters to come from the map file, resulting in an output cube having the same number of lines and samples as the map file. If MATCHMAP = true and the map file is missing a keyword like PixelResolution, the application will fail with a PVL error. Setting MATCHMAP=false allows for some of the mapping components to be overridden by the user or computed from the FROM cube.To learn more about using map projections in ISIS, refer to the ISIS Workshop "Learning About Map Projections".
Categories
Related Applications to Previous Versions of ISIS
This program replaces the following applications existing in previous versions of ISIS:- nuproj
- newmap
- lev2tolev2
Parameter Groups
Files
| Name | Description |
|---|---|
| FROM | Input cube to remap |
| MAP | File containing mapping parameters |
| TO | Newly mapped cube |
| MATCHMAP | Match the map file |
Output Map Resolution
| Name | Description |
|---|---|
| PIXRES | Defines how the pixel resolution in the output map file is obtained |
| RESOLUTION | Pixel resolution |
Output Map Ground Range
| Name | Description |
|---|---|
| DEFAULTRANGE | Defines how the default ground range is determined |
| MINLAT | Minimum Latitude |
| MAXLAT | Maximum Latitude |
| MINLON | Minimum Longitude |
| MAXLON | Maximum Longitude |
| TRIM | Null all pixels outside lat/lon boundaries |
Options
| Name | Description |
|---|---|
| INTERP | Type of interpolation |
Files: FROM
Description
The specification of the input cube to be remapped. The cube must contain a valid Mapping group in the labels.
| Type | cube |
|---|---|
| File Mode | input |
| Filter | *.cub |
Files: MAP
Description
A file containing the desired output mapping parameters in PVL. This file can be a simple label file, hand produced or created via the maptemplate program. It can also be an existing cube or cube label which contains a Mapping group. In the latter case the FROM cube will be transformed into the same map projection, resolution, etc.
| Type | filename |
|---|---|
| File Mode | input |
| Default Path | $base/templates/maps |
| Default | $base/templates/maps/sinusoidal.map |
| Filter | *.map *.cub |
Files: TO
Description
This file will contain the results of the remapping.
| Type | cube |
|---|---|
| File Mode | output |
| Filter | *.cub |
Files: MATCHMAP
Description
This forces all of the mapping parameters to come from the map file. Additionally, when the map file is an image the TO file will have the same number of lines and samples as the map file.
| Type | boolean |
|---|---|
| Default | FALSE |
| Exclusions |
|
Output Map Resolution: PIXRES
Description
This parameter is used to specify how the pixel resolution is obtained for the output map projected cube.
| Type | string | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Default | FROM | |||||||||||||||
| Option List: |
|
Output Map Resolution: RESOLUTION
Description
Specifies the resolution in either meters per pixel or pixels per degree
| Type | double |
|---|---|
| Minimum | 0.0 (exclusive) |
Output Map Ground Range: DEFAULTRANGE
Description
This parameter is used to specify how the default latitude/longitude ground range for the output map projected image is obtained. The ground range can be obtained from the input cube or map file. Note the user can overide the default using the MINLAT, MAXLAT, MINLON, MAXLON parameters. The purpose of the ground range is to define the coverage of the map projected image. Essentially, the ground range and pixel resolution are used to compute the size (samples and line) of the output image.
| Type | string | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Default | FROM | |||||||||
| Option List: |
|
Output Map Ground Range: MINLAT
Description
The minimum latitude of the output map. If this is entered by the user it will override the default input cube or map value.
| Type | double |
|---|---|
| Internal Default | Use default range |
| Minimum | -90.0 (inclusive) |
| Maximum | 90.0 (inclusive) |
Output Map Ground Range: MAXLAT
Description
The maximum latitude of the ground range. If this is entered by the user it will override the default input cube or map value.
| Type | double |
|---|---|
| Internal Default | Use default range |
| Minimum | -90.0 (inclusive) |
| Maximum | 90.0 (inclusive) |
| Greater Than |
|
Output Map Ground Range: MINLON
Description
The minimum longitude of the ground range. If this is entered by the user it will override the default input cube or map value.
| Type | double |
|---|---|
| Internal Default | Use default range |
Output Map Ground Range: MAXLON
Description
The maximum longitude of the ground range. If this is entered by the user it will override the default input cube or map value.
| Type | double |
|---|---|
| Internal Default | Use default range |
| Greater Than |
|
Output Map Ground Range: TRIM
Description
If this option is selected, pixels outside the latitude/longtiude range will be trimmed or set to null. This is useful for certain projections whose lines of latitude and longitude are not parallel to image lines and sample columns.
| Type | boolean |
|---|---|
| Default | FALSE |
Options: INTERP
Description
This is the type of interpolation to be performed on the input.
| Type | string | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Default | CUBICCONVOLUTION | ||||||||||||
| Option List: |
|
Examples
Example 1
map2map example demonstrating use of MATCHMAP
Description
Command Line
GUI Screenshot

map2map MATCHMAP example GUI top
|
Top of GUI for map2map MATCHMAP example The from file is a system LOLA dem. The MAP is an Isis level 2 image. The output file will be a section of the dem extracted out and remapped into the same state as the level 2 image entered as MAP. Because MATCHMAP is checked, all mapping parameters will be determined from MAP, and any listed in the GUI are grayed out. |
|
map2map MATCHMAP example GUI top
|
Middle of GUI for map2map MATCHMAP example This is the middle of the GUI for the map2map MATCHMAP example. It shows everything grayed out in the output map ground range box because MATCHMAP was checked in the previous image. The default INTERP is selected. |
|
map2map MATCHMAP example GUI top
|
Bottom of GUI for map2map MATCHMAP example This is the bottom of the GUI for the map2map MATCHMAP example. It shows the state of the GUI when the application has completed. |
Input Images
Input image (dem) to be reprojected
|
FROM for map2map MATCHMAP example
Parameter Name:
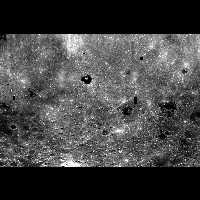
FROM This is a LOLA global dem stored in the Isis system. A section of this file matching the coverage of MAP will be extracted and reprojected to match MAP. |
Isis level 2 MAP
|
MAP for map2map MATCHMAP example
Parameter Name:
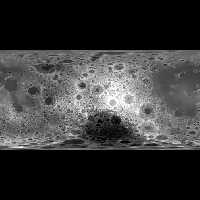
MAP This is a base tile from the PDS Clementine 750. |
Output Image
MATCHMAP example TO
|
TO for map2map MATCHMAP example
Parameter Name:
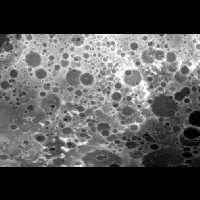
TO This is a section of the LOLA global dem extracted and remapped to match a base tile of the PDS Clementine 750. Notice how the geometry matches the geometry of the second input image above (MAP). |
Example 2
map2map example demonstrating projection change, resolution change, and use of TRIM
Description
Command Line
GUI Screenshot

map2map MATCHMAP example GUI top
|
Top of GUI for map2map TRIM example The FROM file is a Messenger/Mariner10 global Equirectangular mosaic. The MAP file defines a PolarStereographic projection. The TO file will be the polar section of the FROM extracted out and transformed into a PolarStereographic projection. Notice that PIXRES specifies that the resolution is to be read from the MAP. If the pixel resolution is missing from the map file, the application will throw an error. |

map2map MATCHMAP example GUI top
|
Bottom of GUI for map2map TRIM example This is the bottom of the GUI for the map2map TRIM example. It shows that the default map ground range will be read from the MAP. If the ranges are not in MAP, the application will throw an error. Also notice that the TRIM option has been selected. |
Input Image

Input image (dem) to be reprojected
|
FROM for map2map TRIM example
Parameter Name:
FROM This is a Messenger/Mariner10 global mosaice in an Equirectangular map projection. The north polar section of this file will be extracted and transformed to a Polar Stereographic projection and trimmed to the exact lat/lon range specified in the map file, forming a circle. |
Data File
| View PVL mapping file | The is the mapping file that defines the output map projection. Since the default range is set to MAP as well, it also contains the desired lat/lon range of the output level 2 image. |
|---|
Output Image
Output PolarStereographic projection of north pole
|
TO for map2map TRIM example
Parameter Name:
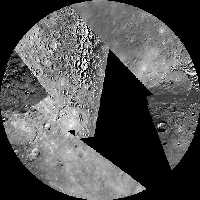
TO This is the north polar section of the Messenger/Mariner10 global mosaic of Mercury in an Polar Stereographic projection and trimmed to the exact lat/lon range specified in the map file to form a circle. |
History
| Kay Edwards | 1986-09-27 | Original version |
| Jeff Anderson | 2003-01-15 | Converted to Isis 3.0 |
| Stuart Sides | 2003-05-16 | Modified schema location from astogeology... to isis.astrogeology... |
| Stuart Sides | 2003-05-30 | Fixed compiler error with uninitialized variable after adding -O1 flag |
| Stuart Sides | 2003-07-29 | Modified filename parameters to be cube parameters where necessary |
| Jacob Danton | 2005-12-05 | Added appTest |
| Elizabeth Miller | 2006-05-18 | Depricated CubeProjection and ProjectionManager to ProjectionFactory |
| Steven Lambright | 2007-06-22 | Fixed typo in user documentation |
| Steven Lambright | 2007-06-27 | Expanded options, fixed conversions when switching measurement systems (such as from planetographic to planetocentric) |
| Steven Lambright | 2007-07-31 | Fixed bug with changing resolutions |
| Steven Lambright | 2007-08-09 | Rewrote resolution handling code to be simpler and fix yet another bug. |
| Steven Lambright | 2007-08-14 | Fixed method of getting cube specific projection group parameters, such as the scale and resolution. |
| Jeff Anderson | 2007-11-08 | Fixed bug trimming longitudes |
| Stuart Sides | 2007-11-16 | Fixed bug when TRIM option was used and most if not all data was being NULLed. |
| Steven Lambright | 2007-12-05 | Fixed bug where user-entered resolutions could be ignored |
| Christopher Austin | 2008-04-18 | Added the MATCHMAP option. |
| Steven Lambright | 2008-05-13 | Removed references to CubeInfo |
| Steven Lambright | 2008-06-13 | The rotation keyword will no longer automatically propagate |
| Steven Lambright | 2008-06-23 | Added helper button and improved error message |
| Steven Lambright | 2008-08-04 | Changed MATCHMAP to default off and added exclusions. If MATCHMAP is true, the ground range and pixel resolution can not be set because they are to be taken from the map file. |
| Steven Lambright | 2008-11-12 | Moved the MATCHMAP parameter to the "FILES" parameter group. Fixed a problem with this program that caused null output images when the input longitude domain was inconsistent with the input longitude range in equatorial cylindrical projections. |
| Christopher Austin | 2008-12-11 | Changed the parameters SLAT, ELAT, SLON, ELON to MINLAT, MAXLAT, MINLON, MAXLON in correlation with autimos. |
| Christopher Austin | 2008-03-12 | Added a default path as well as a helper function for the MAP parameter. |
| Steven Lambright | 2010-08-27 | Made automatic calculation of longitude range more likely to succeed |
| Lynn Weller and Debbie A. Cook | 2012-01-05 | Updated documentation text, added glossary links, and improved compatability with Isis documentation. |
| Tracie Sucharski | 2012-12-06 | Changed to use TProjection instead of Projection. References #775 |
| David L Miller | 2015-08-10 | Fixed bug where map2map fails when missing Scale keyword in the MAP file. Fixes #2151 |