 |
Isis 3 Developer Reference
|
|
Isis 3 Developer Reference
|
Define shapes and provide utilities for shapes stored as Isis3 EquatorialCylindrical map. More...
#include <EquatorialCylindricalShape.h>
Public Member Functions | |
| EquatorialCylindricalShape (Target *target, Pvl &pvl) | |
| Initialize the Isis3 Equatorial Cylindrical shape model. More... | |
| ~EquatorialCylindricalShape () | |
| Destructor for Isis3 Equatorial Cylindrical shape model. More... | |
| bool | intersectSurface (std::vector< double > observerPos, std::vector< double > lookDirection) |
| Finds the surface intersection point. More... | |
| virtual bool | intersectSurface (const Latitude &lat, const Longitude &lon, const std::vector< double > &observerPos, const bool &backCheck=true) |
| Compute surface intersection with optional occlusion check. More... | |
| virtual bool | intersectSurface (const SurfacePoint &surfpt, const std::vector< double > &observerPos, const bool &backCheck=true) |
| Compute surface intersection with optional occlusion check. More... | |
| Distance | localRadius (const Latitude &lat, const Longitude &lon) |
| Gets the radius from the DEM, if we have one. More... | |
| double | demScale () |
| Return the scale of the DEM shape, in pixels per degree. More... | |
| virtual void | calculateDefaultNormal () |
| This method calculates the default normal (Ellipsoid for backwards compatability) for the DemShape. More... | |
| bool | isDEM () const |
| Indicates that this shape model is from a DEM. More... | |
| void | calculateLocalNormal (QVector< double *> cornerNeighborPoints) |
| This method calculates the local surface normal of the current intersection point. More... | |
| void | calculateSurfaceNormal () |
| This method calculates the surface normal of the current intersection point. More... | |
| void | Initialize () |
| Initializes the ShapeModel private variables. More... | |
| SurfacePoint * | surfaceIntersection () const |
| Returns the surface intersection for this ShapeModel. More... | |
| bool | hasIntersection () |
| Returns intersection status. More... | |
| bool | hasNormal () const |
| Returns surface point normal status. More... | |
| virtual void | clearSurfacePoint () |
| Clears or resets the current surface point. More... | |
| virtual double | emissionAngle (const std::vector< double > &sB) |
| Computes and returns emission angle, in degrees, given the observer position. More... | |
| virtual double | incidenceAngle (const std::vector< double > &uB) |
| Computes and returns incidence angle, in degrees, given the illuminator position. More... | |
| virtual double | phaseAngle (const std::vector< double > &sB, const std::vector< double > &uB) |
| Computes and returns phase angle, in degrees, given the positions of the observer and illuminator. More... | |
| QString | name () const |
| Gets the shape name. More... | |
| void | setHasIntersection (bool b) |
| Sets the flag to indicate whether this ShapeModel has an intersection. More... | |
| virtual void | setSurfacePoint (const SurfacePoint &surfacePoint) |
| Set surface intersection point. More... | |
| std::vector< double > | normal () |
| Returns the local surface normal at the current intersection point. More... | |
| virtual bool | isVisibleFrom (const std::vector< double > observerPos, const std::vector< double > lookDirection) |
| Default occulsion implementation. More... | |
Protected Member Functions | |
| Cube * | demCube () |
| Returns the cube defining the shape model. More... | |
| void | setNormal (const std::vector< double >) |
| Sets the normal for the currect intersection point. More... | |
| void | setNormal (const double a, const double b, const double c) |
| Sets the normal for the currect intersection point. More... | |
| void | setName (QString name) |
| Sets the shape name. More... | |
| void | calculateEllipsoidalSurfaceNormal () |
| Calculates the ellipsoidal surface normal. More... | |
| bool | hasEllipsoidIntersection () |
| Returns the status of the ellipsoid model intersection. More... | |
| bool | intersectEllipsoid (const std::vector< double > observerPosRelativeToTarget, const std::vector< double > &observerLookVectorToTarget) |
| Finds the intersection point on the ellipsoid model using the given position of the observer (spacecraft) and direction vector from the observer to the target (body). More... | |
| bool | hasValidTarget () const |
| Returns the status of the target. More... | |
| std::vector< Distance > | targetRadii () const |
| Returns the radii of the body in km. More... | |
| void | setHasNormal (bool status) |
| Sets the flag to indicate whether this ShapeModel has a surface normal. More... | |
| double | resolution () |
| Convenience method to get pixel resolution (m/pix) at current intersection point. More... | |
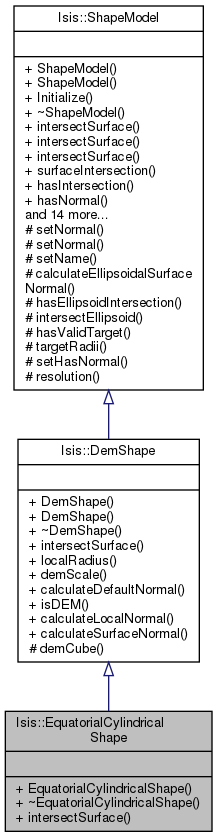
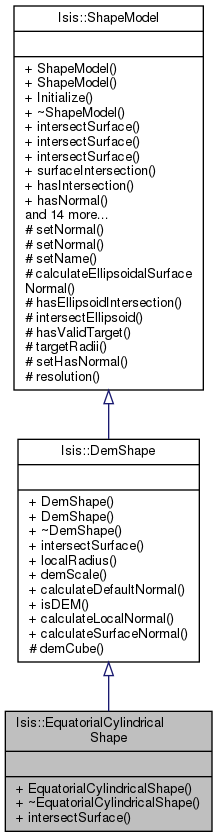
Define shapes and provide utilities for shapes stored as Isis3 EquatorialCylindrical map.
This class will define shapes of Isis3 target bodies with the shape defined by an EquatorialCylindrical map, as well as provide utilities to retrieve radii and photometric information for the intersection point.
Initialize the Isis3 Equatorial Cylindrical shape model.
| pvl | Valid Isis3 cube label. |
References _FILEINFO_, Isis::DemShape::demCube(), Isis::Distance::Kilometers, Isis::ShapeModel::setName(), and Isis::IException::User.
| Isis::EquatorialCylindricalShape::~EquatorialCylindricalShape | ( | ) |
Destructor for Isis3 Equatorial Cylindrical shape model.
|
virtualinherited |
This method calculates the default normal (Ellipsoid for backwards compatability) for the DemShape.
Implements Isis::ShapeModel.
References _FILEINFO_, Isis::NaifStatus::CheckErrors(), Isis::SurfacePoint::GetX(), Isis::SurfacePoint::GetY(), Isis::SurfacePoint::GetZ(), Isis::ShapeModel::hasIntersection(), Isis::Displacement::kilometers(), Isis::ShapeModel::normal(), Isis::IException::Programmer, Isis::ShapeModel::setHasNormal(), Isis::ShapeModel::setNormal(), Isis::ShapeModel::surfaceIntersection(), and Isis::ShapeModel::targetRadii().
Referenced by Isis::DemShape::calculateSurfaceNormal().
|
protectedinherited |
Calculates the ellipsoidal surface normal.
References _FILEINFO_.
|
virtualinherited |
This method calculates the local surface normal of the current intersection point.
| neighborPoints |
Implements Isis::ShapeModel.
References Isis::ShapeModel::normal(), Isis::ShapeModel::setHasNormal(), Isis::ShapeModel::setNormal(), Isis::ShapeModel::surfaceIntersection(), and Isis::SurfacePoint::ToNaifArray().
|
virtualinherited |
This method calculates the surface normal of the current intersection point.
Implements Isis::ShapeModel.
References Isis::DemShape::calculateDefaultNormal().
|
virtualinherited |
Clears or resets the current surface point.
Reimplemented in Isis::BulletShapeModel, and Isis::EmbreeShapeModel.
Referenced by Isis::EmbreeShapeModel::clearSurfacePoint(), Isis::Sensor::SetGround(), Isis::Camera::SetGround(), Isis::Camera::SetImage(), Isis::Sensor::setTime(), Isis::Sensor::SetUniversalGround(), and Isis::Camera::SetUniversalGround().
|
protectedinherited |
Returns the cube defining the shape model.
Returns the DEM Cube object.
Referenced by EquatorialCylindricalShape().
|
inherited |
Return the scale of the DEM shape, in pixels per degree.
Referenced by intersectSurface().
|
virtualinherited |
Computes and returns emission angle, in degrees, given the observer position.
Emission Angle: The angle between the surface normal vector at the intersection point and the vector from the intersection point to the observer (usually the spacecraft). The emission angle varies from 0 degrees when the observer is viewing the sub-spacecraft point (nadir viewing) to 90 degrees when the intercept is tangent to the surface of the target body. Thus, higher values of emission angle indicate more oblique viewing of the target.
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
Reimplemented in Isis::PlaneShape.
References Isis::RAD2DEG.
Referenced by Isis::Sensor::EmissionAngle().
|
protectedinherited |
Returns the status of the ellipsoid model intersection.
|
inherited |
Returns intersection status.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::NaifDskShape::calculateLocalNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::EmbreeShapeModel::calculateLocalNormal(), Isis::BulletShapeModel::calculateLocalNormal(), Isis::EmbreeShapeModel::ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), Isis::BulletShapeModel::ellipsoidNormal(), Isis::Camera::GetLocalNormal(), Isis::Sensor::HasSurfaceIntersection(), intersectSurface(), Isis::EmbreeShapeModel::intersectSurface(), Isis::BulletShapeModel::intersectSurface(), Isis::DemShape::intersectSurface(), Isis::NaifDskShape::setLocalNormalFromIntercept(), and Isis::BulletShapeModel::setLocalNormalFromIntercept().
|
inherited |
Returns surface point normal status.
Referenced by Isis::Camera::GetLocalNormal(), and Isis::EmbreeShapeModel::incidenceAngle().
|
protectedinherited |
Returns the status of the target.
If it is NULL, this method returns false.
Referenced by Isis::EmbreeShapeModel::ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), and Isis::BulletShapeModel::ellipsoidNormal().
|
virtualinherited |
Computes and returns incidence angle, in degrees, given the illuminator position.
Incidence Angle: The angle between the surface normal vector at the intersection point and the vector from the intersection point to the illuminator (usually the sun).
Note: this method does not use the surface model.
| illuminatorBodyFixedPosition | Three dimensional position for the illuminator, in the body-fixed coordinate system. |
Reimplemented in Isis::EmbreeShapeModel, and Isis::PlaneShape.
References Isis::RAD2DEG.
Referenced by Isis::EmbreeShapeModel::incidenceAngle(), and Isis::Sensor::IncidenceAngle().
|
inherited |
Initializes the ShapeModel private variables.
|
protectedinherited |
Finds the intersection point on the ellipsoid model using the given position of the observer (spacecraft) and direction vector from the observer to the target (body).
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
| observerLookVectorToTarget | Three dimensional direction vector from the observer to the target. |
Referenced by Isis::EllipsoidShape::intersectSurface(), and Isis::DemShape::intersectSurface().
|
virtual |
Finds the surface intersection point.
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
| observerLookVectorToTarget | Three dimensional direction vector from the observer to the target. |
Reimplemented from Isis::DemShape.
References Isis::NaifStatus::CheckErrors(), Isis::DEG2RAD, Isis::Angle::Degrees, Isis::DemShape::demScale(), Isis::E, Isis::SurfacePoint::FromNaifArray(), Isis::ShapeModel::hasIntersection(), Isis::DemShape::intersectSurface(), Isis::IsSpecial(), Isis::Distance::kilometers(), Isis::DemShape::localRadius(), Isis::MAX(), Isis::PI, Isis::RAD2DEG, Isis::ShapeModel::setHasIntersection(), Isis::ShapeModel::surfaceIntersection(), and Isis::ShapeModel::targetRadii().
|
virtualinherited |
Compute surface intersection with optional occlusion check.
This method sets the surface point at the given latitude, longitude. The derived model is called to get the radius at that location to complete the accuracy of the surface point, them the derived method is called to complete the intersection.
| lat | Latitude of the surface point |
| lon | Longitude of the surface point |
| observerPos | Position of the observer |
| backCheck | Flag to indicate occlusion check |
Reimplemented in Isis::BulletShapeModel, and Isis::EmbreeShapeModel.
|
virtualinherited |
Compute surface intersection with optional occlusion check.
This method sets the surface point at the given latitude, longitude. The derived model is called to get the radius at that location to complete the accuracy of the surface point, them the derived method is called to complete the intersection.
| surfpt | Absolute point on the surface to check |
| observerPos | Position of the observer |
| backCheck | Flag to indicate occlusion check |
Reimplemented in Isis::BulletShapeModel, and Isis::EmbreeShapeModel.
|
virtualinherited |
Indicates that this shape model is from a DEM.
Since this method returns true for this class, the Camera class will calculate the local normal using neighbor points. This method is pure virtual and must be implemented by all DemShape classes. This parent implementation returns true.
Implements Isis::ShapeModel.
|
virtualinherited |
Default occulsion implementation.
This method is originally copied from Sensor::SetLocalGround(bool backCheck). This version checks for the emission angle from the observer to be less than or equal to 90 degrees.
It is recommended that models derived from this base class reimplement this method if a more robust, efficent test can be made.
Note this implementation does not handle occlusion!
| observerPos | Position of the observer in body fixed coordinates |
| lookDirection | Look direction from the observer |
Reimplemented in Isis::BulletShapeModel, and Isis::EmbreeShapeModel.
|
virtualinherited |
Gets the radius from the DEM, if we have one.
Implements Isis::ShapeModel.
References Isis::Angle::degrees(), Isis::Buffer::DoubleBuffer(), Isis::Interpolator::Interpolate(), Isis::Angle::isValid(), Isis::Distance::Meters, Isis::Cube::read(), Isis::Portal::SetPosition(), Isis::Projection::SetUniversalGround(), Isis::Projection::WorldX(), and Isis::Projection::WorldY().
Referenced by intersectSurface(), and Isis::DemShape::intersectSurface().
|
inherited |
Gets the shape name.
Referenced by Isis::UniversalGroundMap::GroundRange(), Isis::VimsGroundMap::SetGround(), and Isis::Camera::SetGround().
|
inherited |
Returns the local surface normal at the current intersection point.
Note: This method will throw an error if the normal doesn't exist. Use the hasNormal() method to verify before calling this method.
References _FILEINFO_.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::DemShape::calculateLocalNormal(), Isis::Camera::GetLocalNormal(), Isis::EmbreeShapeModel::incidenceAngle(), and Isis::BulletShapeModel::setLocalNormalFromIntercept().
|
virtualinherited |
Computes and returns phase angle, in degrees, given the positions of the observer and illuminator.
Phase Angle: The angle between the vector from the intersection point to the observer (usually the spacecraft) and the vector from the intersection point to the illuminator (usually the sun).
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
| illuminatorBodyFixedPosition | Three dimensional position for the illuminator, in the body-fixed coordinate system. |
References Isis::RAD2DEG.
Referenced by Isis::Sensor::PhaseAngle().
|
protectedinherited |
Convenience method to get pixel resolution (m/pix) at current intersection point.
References _FILEINFO_.
Referenced by Isis::DemShape::intersectSurface().
|
inherited |
Sets the flag to indicate whether this ShapeModel has an intersection.
| b | Indicates whether there is an intersection. |
Referenced by intersectSurface(), Isis::EmbreeShapeModel::intersectSurface(), Isis::PlaneShape::intersectSurface(), Isis::DemShape::intersectSurface(), and Isis::Sensor::SetLookDirection().
|
protectedinherited |
Sets the flag to indicate whether this ShapeModel has a surface normal.
| b | Indicates whether there is a normal. |
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::DemShape::calculateLocalNormal(), and Isis::EmbreeShapeModel::clearSurfacePoint().
|
protectedinherited |
Sets the shape name.
| name | The name of the ShapeModel. |
Referenced by Isis::BulletShapeModel::BulletShapeModel(), Isis::DemShape::DemShape(), Isis::EllipsoidShape::EllipsoidShape(), Isis::EmbreeShapeModel::EmbreeShapeModel(), EquatorialCylindricalShape(), Isis::NaifDskShape::NaifDskShape(), and Isis::PlaneShape::PlaneShape().
|
protectedinherited |
Sets the normal for the currect intersection point.
Note: This method will throw an error if this ShapeModel doesn't have and intersection. Use the hasIntersection() method to verify before calling this method.
| normal | Three dimensional surface normal vector. |
References _FILEINFO_.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::DemShape::calculateLocalNormal(), Isis::NaifDskShape::calculateSurfaceNormal(), Isis::EmbreeShapeModel::calculateSurfaceNormal(), Isis::BulletShapeModel::calculateSurfaceNormal(), Isis::EmbreeShapeModel::incidenceAngle(), Isis::PlaneShape::intersectSurface(), Isis::NaifDskShape::setLocalNormalFromIntercept(), and Isis::BulletShapeModel::setLocalNormalFromIntercept().
|
protectedinherited |
Sets the normal for the currect intersection point.
Note: This method will throw an error if this ShapeModel doesn't have and intersection. Use the hasIntersection() method to verify before calling this method.
| a | First coordinate value for the three dimensional surface normal. |
| b | Second coordinate value for the three dimensional surface normal. |
| c | Third coordinate value for the three dimensional surface normal. |
References _FILEINFO_.
|
virtualinherited |
Set surface intersection point.
| surfacePoint | Position coordinate for the surface point. |
Reimplemented in Isis::BulletShapeModel.
Referenced by Isis::NaifDskShape::intersectSurface(), and Isis::RadarGroundMap::SetGround().
|
inherited |
Returns the surface intersection for this ShapeModel.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::DemShape::calculateLocalNormal(), Isis::Sensor::Coordinate(), Isis::NaifDskShape::ellipsoidNormal(), Isis::EmbreeShapeModel::ellipsoidNormal(), Isis::BulletShapeModel::ellipsoidNormal(), Isis::PlaneShape::emissionAngle(), Isis::Sensor::GetLatitude(), Isis::Sensor::GetLongitude(), Isis::Sensor::GetSurfacePoint(), Isis::PlaneShape::incidenceAngle(), intersectSurface(), Isis::PlaneShape::intersectSurface(), Isis::DemShape::intersectSurface(), Isis::EmbreeShapeModel::isVisibleFrom(), Isis::PlaneShape::localRadius(), Isis::Sensor::LocalRadius(), Isis::Sensor::SlantDistance(), and Isis::Sensor::SolarDistance().
|
protectedinherited |
Returns the radii of the body in km.
The radii are obtained from the target. Note: This method will throw an error if the ShapeModel does not have a valid target. Use the hasValidTarget() method to verify before calling this method.
References _FILEINFO_.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::EmbreeShapeModel::ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), Isis::BulletShapeModel::ellipsoidNormal(), intersectSurface(), and Isis::EllipsoidShape::localRadius().