This program will geometrically transform a map projected image
(ISIS level2cube or mosaic) into an ISIS
level1 cube using a level1 cube as input to match. This allows for example
a Viking base map to be converted to a MOC raw geometry image.
The main purpose of this program is to facilitate control point selection between a level1 cube and a
base map. The MATCH image and the resulting TO file can be opened in the program qnet along with other
level1 cubes for building a control network with ties to ground.
This program replaces the following
applications
existing in previous versions of ISIS:
lev2tolev1
base2l1
base
History
Kay Edwards
1987-09-02
Original version
Jeff Anderson
2003-06-06
Converted to Isis 3.0
Jacob Danton
2005-12-05
Fixed a bug in BandChange, added appTest
Elizabeth Miller
2006-03-23
Fixed appTest to reflect changes made to all camera models
Steven Lambright
2006-06-22
Fixed typo in user documentation
Steven Lambright
2008-05-13
Removed references to CubeInfo
Lynn Weller and Debbie A. Cook
2012-01-17
Updated documentation text, added glossary links, and improved compatability with Isis documentation.
Travis Addair
2012-04-23
SPICE tables are now propagated from the MATCH cube to the output.
Debbie A. Cook
2012-12-06
Changed to use TProjection instead of Projection. References #775
Steven Lambright
2013-02-12
Fixed an issue that caused this program to trim output images erroneously. This problem,
and the recommended solution, was provided by Jeff Anderson. Fixes #984.
This cube defines the raw instrument geometry to be matched. The
output file will have the same labels (Kernels and Instrument
group). Note the Band group will represent data from the
raw camera and the content of the cube may not match. For example,
using the MOLA base as the FROM file and a MOC Wide Angle Red cube
as the MATCH, will have labels which indicate geometry for the MOC
WA red camera but the pixels will contain MOLA elevations.
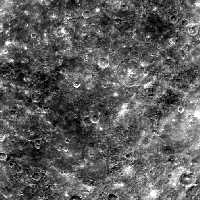
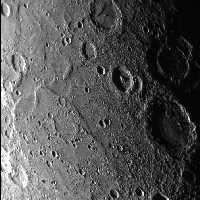
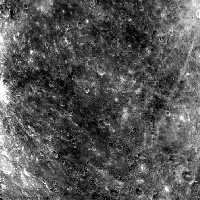
In this example, the map2cam application is used to map a base map into
the same geometry as the matching Messenger level 1 image. The output
file can then be used to select control points. Sometimes matching
features can be found easier when features when a comparing level 1
image to another level 1 image.