 |
Isis 3 Programmer Reference
|
|
Isis 3 Programmer Reference
|
Convert between undistorted focal plane and ground coordinates. More...
#include <IrregularBodyCameraGroundMap.h>
Public Types | |
| enum | PartialType { WRT_Latitude , WRT_Longitude , WRT_Radius , WRT_MajorAxis , WRT_MinorAxis , WRT_PolarAxis } |
| Radius axes types to use when computing partials. More... | |
Public Member Functions | |
| IrregularBodyCameraGroundMap (Camera *parent, const bool clip_emission_angles=false) | |
| Constructor. | |
| virtual | ~IrregularBodyCameraGroundMap () |
| Destructor. | |
| virtual bool | GetXY (const SurfacePoint &spoint, double *cudx, double *cudy) |
| This method computes the undistorted focal plane coordinates for a ground position, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y. | |
| virtual bool | SetFocalPlane (const double ux, const double uy, const double uz) |
| Compute ground position from focal plane coordinate. | |
| virtual bool | SetGround (const Latitude &lat, const Longitude &lon) |
| Compute undistorted focal plane coordinate from ground position. | |
| virtual bool | SetGround (const SurfacePoint &surfacePoint) |
| Compute undistorted focal plane coordinate from ground position that includes a local radius. | |
| virtual bool | GetXY (const SurfacePoint &spoint, double *cudx, double *cudy, bool test=true) |
| Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call. | |
| virtual bool | GetXY (const double lat, const double lon, const double radius, double *cudx, double *cudy) |
| Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call. | |
| virtual bool | GetdXYdPosition (const SpicePosition::PartialType varType, int coefIndex, double *cudx, double *cudy) |
| Compute derivative w/r to position of focal plane coordinate from ground position using current Spice from SetImage call. | |
| virtual bool | GetdXYdOrientation (const SpiceRotation::PartialType varType, int coefIndex, double *cudx, double *cudy) |
| Compute derivative of focal plane coordinate w/r to instrument using current state from SetImage call. | |
| virtual bool | GetdXYdTOrientation (const SpiceRotation::PartialType varType, int coefIndex, double *cudx, double *cudy) |
| Compute derivative of focal plane coordinate w/r to target body using current state. | |
| virtual bool | GetdXYdPoint (std::vector< double > d_pB, double *dx, double *dy) |
| Compute derivative of focal plane coordinate w/r to ground point using current state. | |
| std::vector< double > | PointPartial (SurfacePoint spoint, PartialType wrt) |
| Compute derivative with respect to indicated variable of conversion function from lat/lon/rad to rectangular coord. | |
| std::vector< double > | EllipsoidPartial (SurfacePoint spoint, PartialType raxis) |
| Compute derivative of focal plane coordinate w/r to one of the ellipsoidal radii (a, b, or c) | |
| std::vector< double > | MeanRadiusPartial (SurfacePoint spoint, Distance meanRadius) |
| Compute derivative of focal plane coordinate w/r to mean of the ellipsoidal radii (a, b, c) | |
| double | DQuotient (std::vector< double > &look, std::vector< double > &dlook, int index) |
| Convenience method for quotient rule applied to look vector. | |
| double | FocalPlaneX () const |
| double | FocalPlaneY () const |
Protected Member Functions | |
| void | LookCtoFocalPlaneXY () |
| Calculate focalplane x/y from lookvector in camera. | |
Protected Attributes | |
| bool | m_clip_emission |
| Camera * | p_camera |
| Camera. | |
| double | p_focalPlaneX |
| Camera's x focal plane coordinate. | |
| double | p_focalPlaneY |
| Camera's y focal plane coordinate. | |
| std::vector< double > | m_pB |
| Surface point calculated from ground coordinates in GetXY and used for partials. | |
| std::vector< double > | m_lookJ |
| Look vector in J2000 calculated from ground coordinates in GetXY and used for partials. | |
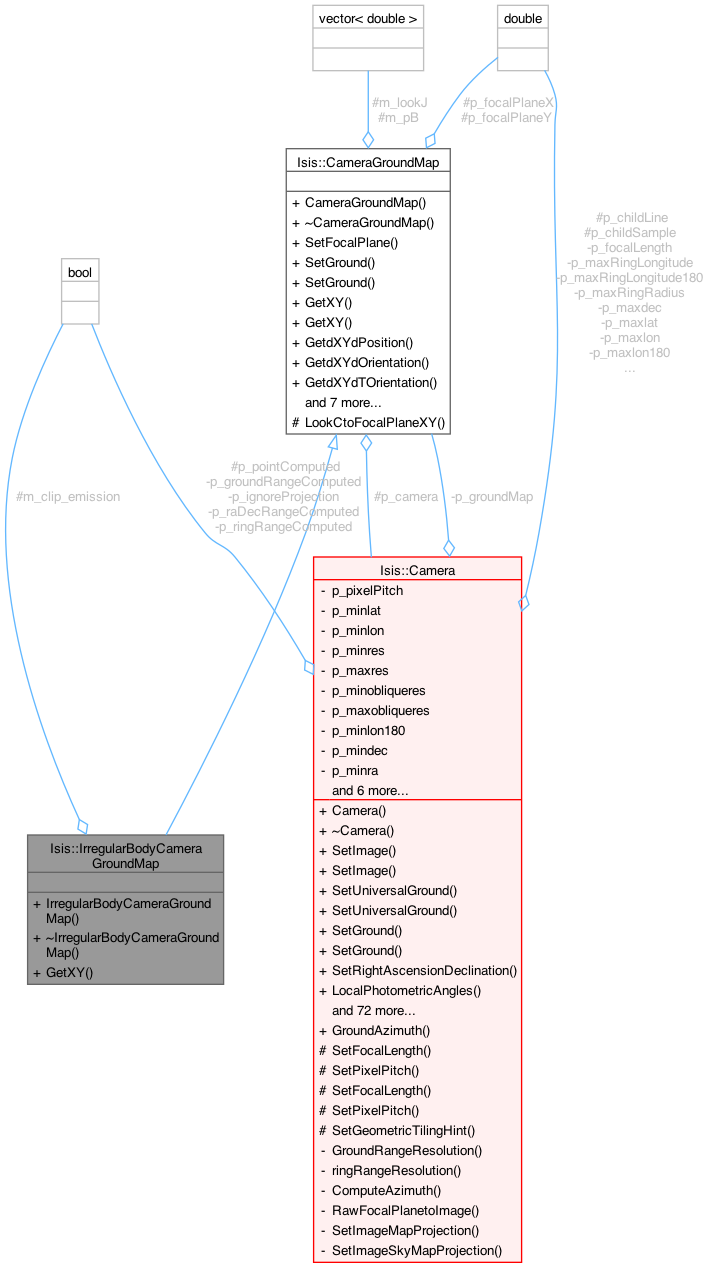
Convert between undistorted focal plane and ground coordinates.
This class is derived from CameraGroundMap to support the special case of irregular bodies. Particularly, only the GetXY() method is reimplemented here to never perform the "emission angle" (in places called "back-of-the- planet") test. This is because the test uses the ellipsoid to validate ground point visibility along the look vector to the surface. This is not adequate for most irregular bodies.
2018-07-26 UA/OSIRIS-REx IPWG Team - Developed to support control of irregular bodies
2024-03-10 Ken Edmundson - Modified per Kris Becker such that the emission angle (or back-of-the-planet) test is never performed in the GetXY method (see class description above).
Definition at line 40 of file IrregularBodyCameraGroundMap.h.
|
inherited |
Radius axes types to use when computing partials.
When computing partials, this enum represents the "with respect to" variable in the computation.
Definition at line 91 of file CameraGroundMap.h.
| Isis::IrregularBodyCameraGroundMap::IrregularBodyCameraGroundMap | ( | Camera * | parent, |
| const bool | clip_emission_angles = false ) |
Constructor.
| parent | Pointer to camera to be used for mapping with ground |
Definition at line 21 of file IrregularBodyCameraGroundMap.cpp.
|
inlinevirtual |
Destructor.
Definition at line 45 of file IrregularBodyCameraGroundMap.h.
|
inherited |
Convenience method for quotient rule applied to look vector.
This method will compute the derivative of the following function (coordinate x or y) / (coordinate z)
| look | look vector in camera frame |
| dlook | derivative of look vector in camera frame |
| index | vector value to differentiate |
Definition at line 550 of file CameraGroundMap.cpp.
Referenced by Isis::CameraGroundMap::GetdXYdOrientation(), Isis::CameraGroundMap::GetdXYdPoint(), Isis::CameraGroundMap::GetdXYdPosition(), and Isis::CameraGroundMap::GetdXYdTOrientation().
|
inherited |
Compute derivative of focal plane coordinate w/r to one of the ellipsoidal radii (a, b, or c)
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to the a (major axis), b (minor axis), or c (polar axis) radius, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
| spoint | Surface point whose derivative is to be evalutated |
| raxis | Radius axis enumerated partial type (definitions in this header) |
| IException::Programmer | "Invalid partial type for this method" |
Definition at line 436 of file CameraGroundMap.cpp.
References Isis::IException::Programmer.
|
inlineinherited |
Definition at line 126 of file CameraGroundMap.h.
References Isis::CameraGroundMap::p_focalPlaneX.
Referenced by Isis::Camera::RawFocalPlanetoImage().
|
inlineinherited |
Definition at line 133 of file CameraGroundMap.h.
References Isis::CameraGroundMap::p_focalPlaneY.
Referenced by Isis::Camera::RawFocalPlanetoImage().
|
virtualinherited |
Compute derivative of focal plane coordinate w/r to instrument using current state from SetImage call.
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to the instrument orientation, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
| varType | enumerated partial type (definitions in SpicePosition) |
| coefIndex | coefficient index of fit polynomial |
| *dx | out] pointer to partial derivative of undistorted focal plane x |
| *dy | [out] pointer to partial derivative of undistorted focal plane y |
Definition at line 318 of file CameraGroundMap.cpp.
References Isis::Camera::DistortionMap(), Isis::CameraGroundMap::DQuotient(), Isis::Spice::instrumentRotation(), Isis::CameraGroundMap::m_lookJ, Isis::CameraGroundMap::p_camera, and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
Referenced by Isis::IsisBundleObservation::computeImagePartials().
|
virtualinherited |
Compute derivative of focal plane coordinate w/r to ground point using current state.
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to lat, lon, or radius, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
| d_pB | Point vector |
| *dx | [out] pointer to partial derivative of undistorted focal plane x |
| *dy | [out] pointer to partial derivative of undistorted focal plane y |
Reimplemented in Isis::RadarGroundMap.
Definition at line 398 of file CameraGroundMap.cpp.
References Isis::Spice::bodyRotation(), Isis::Camera::DistortionMap(), Isis::CameraGroundMap::DQuotient(), Isis::Spice::instrumentRotation(), Isis::CameraGroundMap::m_lookJ, Isis::CameraGroundMap::p_camera, and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
|
virtualinherited |
Compute derivative w/r to position of focal plane coordinate from ground position using current Spice from SetImage call.
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to a spacecraft position coordinate, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
| varType | enumerated partial type (definitions in SpicePosition) |
| coefIndex | coefficient index of fit polynomial |
| *dx | [out] pointer to partial derivative of undistorted focal plane x |
| *dy | [out] pointer to partial derivative of undistorted focal plane y |
Reimplemented in Isis::RadarGroundMap.
Definition at line 279 of file CameraGroundMap.cpp.
References Isis::Camera::DistortionMap(), Isis::CameraGroundMap::DQuotient(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::CameraGroundMap::m_lookJ, Isis::CameraGroundMap::p_camera, and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
Referenced by Isis::IsisBundleObservation::computeImagePartials().
|
virtualinherited |
Compute derivative of focal plane coordinate w/r to target body using current state.
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to the target body orientation, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
| varType | enumerated partial type (definitions in SpicePosition) |
| coefIndex | coefficient index of fit polynomial |
| *dx | [out] pointer to partial derivative of undistorted focal plane x |
| *dy | [out] pointer to partial derivative of undistorted focal plane y |
Definition at line 354 of file CameraGroundMap.cpp.
References Isis::Spice::bodyRotation(), Isis::Camera::DistortionMap(), Isis::CameraGroundMap::DQuotient(), Isis::Spice::instrumentRotation(), Isis::CameraGroundMap::m_lookJ, Isis::CameraGroundMap::m_pB, Isis::CameraGroundMap::p_camera, and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
|
virtualinherited |
Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call.
This method will compute the undistorted focal plane coordinate for a ground position, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/m_pB/x/y. The class value for m_lookJ is set by this method.
| lat | Latitude in degrees |
| lon | Longitude in degrees |
| radius | Radius in meters |
| cudx | [out] Pointer to computed undistored x focal plane coordinate |
| cudy | [out] Pointer to computed undistored y focal plane coordinate |
Definition at line 254 of file CameraGroundMap.cpp.
References Isis::Angle::Degrees, Isis::CameraGroundMap::GetXY(), and Isis::Distance::Meters.
|
virtual |
This method computes the undistorted focal plane coordinates for a ground position, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
The class value value for m_pB and m_lookJ are set by this method.
This method has been reimplemented from the CameraGroundMap class to never perform the emission angle check. This is because it uses the ellipsoid for the check which is in general not adequate for irregular bodies.
| point | Surface point (ground position) |
| cudx | [out] Pointer to computed undistored x focal plane coordinate |
| cudy | [out] Pointer to computed undistored y focal plane coordinate |
Definition at line 42 of file IrregularBodyCameraGroundMap.cpp.
References Isis::CameraGroundMap::GetXY().
|
virtualinherited |
Compute undistorted focal plane coordinate from ground position using current Spice from SetImage call.
This method will compute the undistorted focal plane coordinate for a ground position, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/m_pB/x/y. The class value for m_lookJ is set by this method.
| point | Surface point (ground position) |
| cudx | [out] Pointer to computed undistorted x focal plane coordinate |
| cudy | [out] Pointer to computed undistorted y focal plane coordinate |
| test | Optional parameter to indicate whether to do the back-of-planet test. |
Reimplemented in Isis::RadarGroundMap.
Definition at line 152 of file CameraGroundMap.cpp.
References Isis::Spice::bodyRotation(), Isis::Camera::DistortionMap(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::Displacement::kilometers(), Isis::CameraGroundMap::m_lookJ, Isis::CameraGroundMap::m_pB, Isis::CameraGroundMap::p_camera, Isis::PI, Isis::Spice::target(), and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
Referenced by Isis::CameraGroundMap::GetXY(), and GetXY().
|
protectedinherited |
Calculate focalplane x/y from lookvector in camera.
Compute undistorted focal plane coordinate from camera look vector.
Definition at line 106 of file CameraGroundMap.cpp.
References Isis::Camera::DistortionMap(), Isis::CameraGroundMap::p_camera, Isis::CameraGroundMap::p_focalPlaneX, Isis::CameraGroundMap::p_focalPlaneY, and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
Referenced by Isis::CameraGroundMap::SetGround(), and Isis::CameraGroundMap::SetGround().
|
inherited |
Compute derivative of focal plane coordinate w/r to mean of the ellipsoidal radii (a, b, c)
This method will compute the derivative of the undistorted focal plane coordinate for a ground position with respect to the mean of the a (major axis), b (minor axis), and c (polar axis) radius, using the current Spice settings (time and kernels) without resetting the current point values for lat/lon/radius/x/y.
| spoint | Surface point whose derivative is to be evalutated |
| meanRadius | Computed mean of radii |
Definition at line 486 of file CameraGroundMap.cpp.
References Isis::Distance::kilometers().
|
inherited |
Compute derivative with respect to indicated variable of conversion function from lat/lon/rad to rectangular coord.
| spoint | Surface point (ground position) |
| wrt | take derivative with respect to this value |
Definition at line 508 of file CameraGroundMap.cpp.
|
virtualinherited |
Compute ground position from focal plane coordinate.
This method will compute the ground position given an undistorted focal plane coordinate. Note that the latitude/longitude value can be obtained from the camera pointer passed into the constructor.
| ux | undistorted focal plane x in millimeters |
| uy | undistorted focal plane y in millimeters |
| uz | undistorted focal plane z in millimeters |
Reimplemented in Isis::RadarGroundMap, and Isis::VimsGroundMap.
Definition at line 50 of file CameraGroundMap.cpp.
References Isis::NaifStatus::CheckErrors(), Isis::CameraGroundMap::p_camera, and Isis::Sensor::SetLookDirection().
Referenced by Isis::Camera::SetImage(), and Isis::Camera::SetImage().
|
virtualinherited |
Compute undistorted focal plane coordinate from ground position.
| lat | planetocentric latitude in degrees |
| lon | planetocentric longitude in degrees |
Reimplemented in Isis::LineScanCameraGroundMap, Isis::PushFrameCameraGroundMap, Isis::RadarGroundMap, and Isis::VimsGroundMap.
Definition at line 76 of file CameraGroundMap.cpp.
References Isis::Angle::Degrees, Isis::Sensor::LocalRadius(), Isis::CameraGroundMap::LookCtoFocalPlaneXY(), Isis::Distance::Meters, Isis::CameraGroundMap::p_camera, and Isis::Spice::target().
Referenced by Isis::PushFrameCameraGroundMap::SetGround(), Isis::Camera::SetGround(), Isis::Camera::SetUniversalGround(), and Isis::Camera::SetUniversalGround().
|
virtualinherited |
Compute undistorted focal plane coordinate from ground position that includes a local radius.
| surfacePoint | Surface point (ground position) |
Reimplemented in Isis::LineScanCameraGroundMap, Isis::RadarGroundMap, Isis::VimsGroundMap, and Isis::PushFrameCameraGroundMap.
Definition at line 126 of file CameraGroundMap.cpp.
References Isis::CameraGroundMap::LookCtoFocalPlaneXY(), and Isis::CameraGroundMap::p_camera.
|
protected |
Definition at line 50 of file IrregularBodyCameraGroundMap.h.
|
protectedinherited |
Look vector in J2000 calculated from ground coordinates in GetXY and used for partials.
Definition at line 146 of file CameraGroundMap.h.
Referenced by Isis::CameraGroundMap::GetdXYdOrientation(), Isis::CameraGroundMap::GetdXYdPoint(), Isis::CameraGroundMap::GetdXYdPosition(), Isis::CameraGroundMap::GetdXYdTOrientation(), and Isis::CameraGroundMap::GetXY().
|
protectedinherited |
Surface point calculated from ground coordinates in GetXY and used for partials.
Definition at line 144 of file CameraGroundMap.h.
Referenced by Isis::CameraGroundMap::GetdXYdTOrientation(), and Isis::CameraGroundMap::GetXY().
|
protectedinherited |
Definition at line 138 of file CameraGroundMap.h.
Referenced by Isis::CameraGroundMap::CameraGroundMap(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::PushFrameCameraGroundMap::FindSpacecraftDistance(), Isis::CameraGroundMap::GetdXYdOrientation(), Isis::CameraGroundMap::GetdXYdPoint(), Isis::CameraGroundMap::GetdXYdPosition(), Isis::CameraGroundMap::GetdXYdTOrientation(), Isis::CameraGroundMap::GetXY(), Isis::VimsGroundMap::Init(), Isis::CameraGroundMap::LookCtoFocalPlaneXY(), Isis::CameraGroundMap::SetFocalPlane(), Isis::VimsGroundMap::SetFocalPlane(), Isis::CameraGroundMap::SetGround(), Isis::LineScanCameraGroundMap::SetGround(), Isis::PushFrameCameraGroundMap::SetGround(), Isis::VimsGroundMap::SetGround(), and Isis::CameraGroundMap::SetGround().
|
protectedinherited |
Camera's x focal plane coordinate.
Definition at line 139 of file CameraGroundMap.h.
Referenced by Isis::CameraGroundMap::FocalPlaneX(), Isis::CameraGroundMap::LookCtoFocalPlaneXY(), and Isis::VimsGroundMap::SetGround().
|
protectedinherited |
Camera's y focal plane coordinate.
Definition at line 140 of file CameraGroundMap.h.
Referenced by Isis::CameraGroundMap::FocalPlaneY(), Isis::CameraGroundMap::LookCtoFocalPlaneXY(), and Isis::VimsGroundMap::SetGround().