 |
Isis 3 Programmer Reference
|
|
Isis 3 Programmer Reference
|
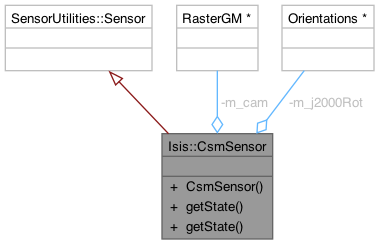
Implementation of the SensorUtilities::Sensor interface for a CSM RasterGM model. More...
#include <CsmSensor.h>
Public Member Functions | |
| CsmSensor (csm::RasterGM *cam, ale::Orientations *j2000Rot) | |
| Create a CSMSensor from a CSM RasterGM model and the rotation to J2000. | |
| virtual SensorUtilities::ObserverState | getState (const SensorUtilities::ImagePt &imagePoint) |
| Get the state of the model at a given image point. | |
| virtual SensorUtilities::ObserverState | getState (const SensorUtilities::GroundPt3D &groundPt) |
| Get the state of the model as it observers a given ground point. | |
Private Attributes | |
| csm::RasterGM * | m_cam |
| ale::Orientations * | m_j2000Rot |
| The time dependent rotation from object space to J2000. | |
Implementation of the SensorUtilities::Sensor interface for a CSM RasterGM model.
This also incorporates an ALE Orientations object to hanlde the transformation from object space, which CSM only operates in, to the universal J2000 reference frame.
Definition at line 24 of file CsmSensor.h.
| Isis::CsmSensor::CsmSensor | ( | csm::RasterGM * | cam, |
| ale::Orientations * | j2000Rot ) |
Create a CSMSensor from a CSM RasterGM model and the rotation to J2000.
| cam | The CSM model to dispatch to for actual sensor computations |
| j2000Rot | The rotation from object space to the universal J2000 reference frame. This must use the same time range as cam. |
Definition at line 25 of file CsmSensor.cpp.
References m_j2000Rot.
|
virtual |
Get the state of the model as it observers a given ground point.
This method uses RasterGM::groundToImage with the default precision of 0.001 pixels.
Definition at line 71 of file CsmSensor.cpp.
References getState().
|
virtual |
Get the state of the model at a given image point.
Definition at line 37 of file CsmSensor.cpp.
References m_j2000Rot.
Referenced by getState().
|
private |
Definition at line 32 of file CsmSensor.h.
|
private |
The time dependent rotation from object space to J2000.
This should use the same time range as the CSM model.
Definition at line 37 of file CsmSensor.h.
Referenced by CsmSensor(), and getState().