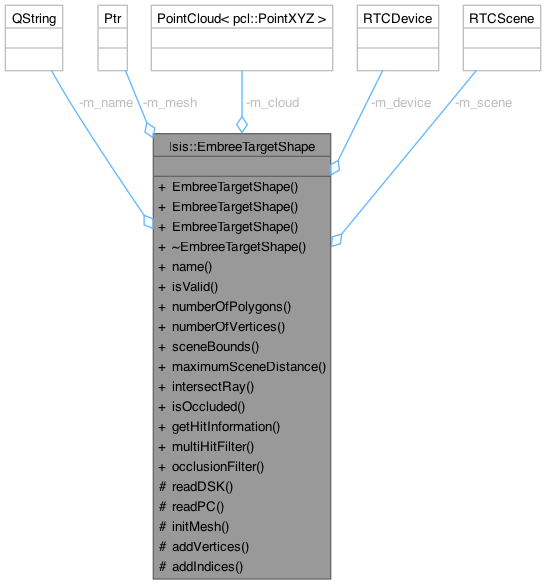
Embree Target Shape for planetary bodies.
This class holds the Embree representation of a target body. All vectors are expected to be in the body-fixed reference frame for the target and all positions are expected to be in kilometers.
- Author
- 2017-05-11 Jeannie Backer & Jesse Mapel
- History
- 2017-05-11 Jeannie Backer & Jesse Mapel - Original Version
Definition at line 139 of file EmbreeTargetShape.h.
Extract the intersection point and unit surface normal from an RTCMultiHitRay that has been intersected with the target shape.
This method performs two calculations. First, it converts the intersection point from barycentric coordinates relative to the intersected polygon to the body-fixed (x, y, z) coordinates. Second, it computes the unit normal vector of the intersected polygon. The polygon vertices are assumed to be ordered counter-clockwise about the exterior surface normal as they are in NAIF type 2 DSK files.
- Parameters
-
| ray | The ray to extract intersection information from. |
| hitIndex | The index of the intersection to extract. |
- Returns
- RayHitInformation The body-fixed intersection coordinate in kilometers and the unit surface normal at the intersection.
- Exceptions
-
Definition at line 707 of file EmbreeTargetShape.cpp.
References Isis::RTCMultiHitRay::hitGeomIDs, Isis::RTCMultiHitRay::hitPrimIDs, Isis::RTCMultiHitRay::hitUs, Isis::RTCMultiHitRay::hitVs, Isis::RTCMultiHitRay::lastHit, m_scene, Isis::LinearAlgebra::normalize(), Isis::IException::Programmer, Isis::toString(), Isis::EmbreeTargetShape::Triangle::v0, Isis::EmbreeTargetShape::Triangle::v1, Isis::EmbreeTargetShape::Triangle::v2, Isis::EmbreeTargetShape::Vertex::x, Isis::EmbreeTargetShape::Vertex::y, and Isis::EmbreeTargetShape::Vertex::z.
| void Isis::EmbreeTargetShape::initMesh |
( |
pcl::PolygonMesh::Ptr | mesh | ) |
|
|
protected |
Internalize a PointCloudLibrary polygon mesh in the target shape.
The mesh itself is stored along with a duplicate of the vertex point cloud because the point cloud stored in the polygon mesh cannot be read without Robot Operating System routines. The mesh is loaded into the internal Embree scene and the scene is commited. Any changes made to the Embree scene after this method is called will not take effect until embree::rtcCommit is called again.
- Note
- This method is NOT reentrant. Calling this again with a new mesh will remove the PointCloudLibrary representation of the old mesh but the Embree scene will contain all previous meshes along with the new mesh. Use embree::rtcDeleteGeometry to remove an old mesh from the scene.
- Parameters
-
| mesh | The mesh to be internalized. |
Definition at line 450 of file EmbreeTargetShape.cpp.
References isValid(), m_cloud, m_device, m_mesh, m_scene, multiHitFilter(), numberOfPolygons(), numberOfVertices(), occlusionFilter(), Isis::EmbreeTargetShape::Triangle::v0, Isis::EmbreeTargetShape::Triangle::v1, Isis::EmbreeTargetShape::Triangle::v2, Isis::EmbreeTargetShape::Vertex::x, Isis::EmbreeTargetShape::Vertex::y, and Isis::EmbreeTargetShape::Vertex::z.
Referenced by EmbreeTargetShape(), and EmbreeTargetShape().
Intersect a ray with the target shape.
After calling, up to 16 intersections will be stored within the RTCMultiHitRay. The intersection information will be stored in the following arrays:
-
hitGeomIDs: The Embree Geometry ID of the intersected geometry
-
hitPrimIDs: The index of the intersected polygon
-
hitUs: The Barycentric u coordinate of the intersection relative to the intersected polygon
-
hitVs: The Barycentric V coordinate of the intersection relative to the intersected polygon
The index of the last intersection is stored in lastHit.
- Note
- The intersection information is stored in the order that Embree finds them. This is not necessarily their order along the ray. Only the first intersection is guaranteed to be in the correct order. Other intersections may be swapped with the next, or previous, intersection relative to their order along the ray.
- Parameters
-
| [in,out] | ray | The ray to intersect with the scene. After calling, The intersection information will be stored in the ray. |
- See also
- embree::rtcIntersect
Definition at line 657 of file EmbreeTargetShape.cpp.
References isValid(), and m_scene.
| void Isis::EmbreeTargetShape::multiHitFilter |
( |
const RTCFilterFunctionNArguments * | args | ) |
|
|
static |
| void Isis::EmbreeTargetShape::occlusionFilter |
( |
const RTCFilterFunctionNArguments * | args | ) |
|
|
static |
Filter function for collecting multiple primitiveIDs This function is called by the Embree library during ray tracing.
Each time an intersection is found, this method is called.
- Parameters
-
| [in] | userDataPtr | Data pointer from the geometry hit. Not used. |
| [in,out] | ray | The ray being traced. Information about the intersection will be stored in the ray. |
Definition at line 820 of file EmbreeTargetShape.cpp.
References Isis::RTCOcclusionRay::ignorePrimID.
Referenced by initMesh().
| pcl::PolygonMesh::Ptr Isis::EmbreeTargetShape::readDSK |
( |
FileName | file | ) |
|
|
protected |
| RTCBounds Isis::EmbreeTargetShape::sceneBounds |
( |
| ) |
const |
Returns the bounds of the Embree scene.
If the scene has not been initialized, then all bounds are returned as 0.0.
- Returns
- RTCBounds Struct containing the upper and lower bounds on each dimension of the scene. Bounds are stored as floats in lower_x, upper_x, lower_y, upper_y, lower_z, and upper_z.
Definition at line 595 of file EmbreeTargetShape.cpp.
References isValid(), m_scene, and sceneBounds().
Referenced by maximumSceneDistance(), and sceneBounds().