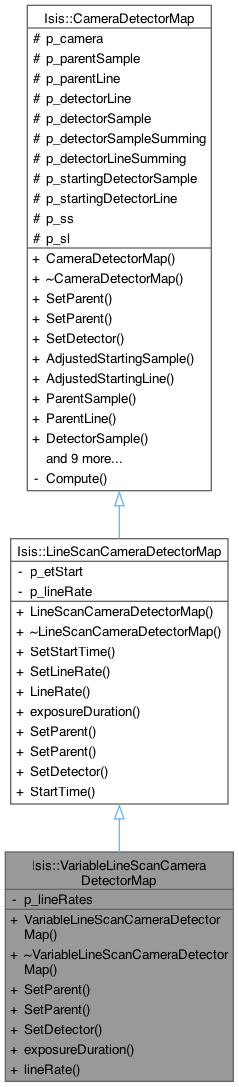
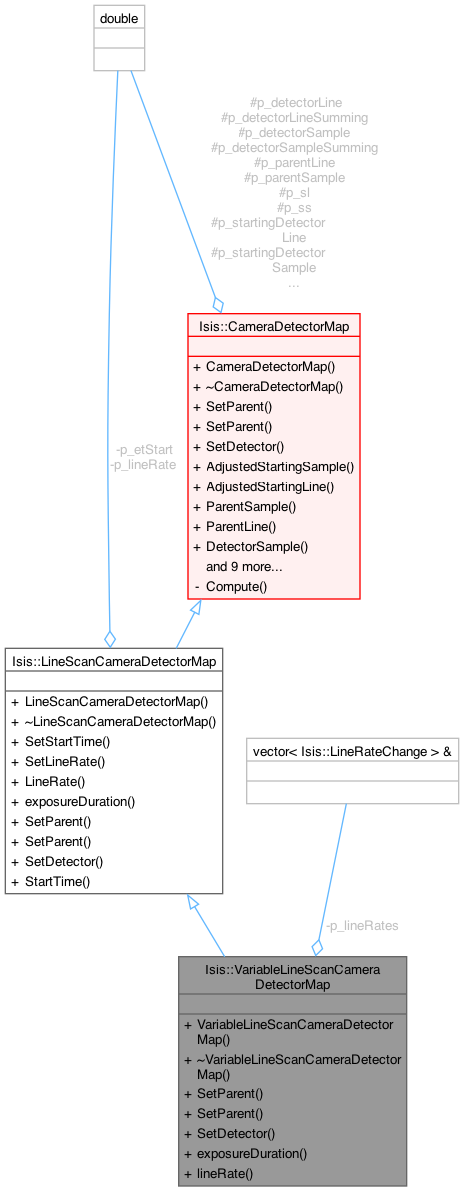
Convert between parent image coordinates and detector coordinates.
This class is used to convert between parent dector coordinates (sample/line) and detector coordinates for a line scan camera.
- Author
- 2008-08-08 Steven Lambright
- See also
- Camera
- History
2008-08-08 Steven Lambright Original version
2009-03-07 Debbie A. Cook Removed reference to obsolute CameraDetectorMap methods
2012-06-20 Debbie A. Cook, Updated Spice members to be more compliant with Isis
coding standards
- History
2016-10-18 Kristin Berry - Added new SetParent method to include time offset. Updated test. References #4476.
2016-10-19 Jesse Mapel - Added exposureDuration method for accessing a pixel's exposure duration. Updated test. References #4476.
2016-10-21 Jesse Mapel - Moved the LineRateChange look up to a separate method. References #4476.
2016-10-21 Jesse Mapel and Kristin Berry - Fixed bug in SetDetector() and SetParent() methods so that we now subtract 1/2 pixel from the rateStartLine to calculate the p_parentLine and et variables, respectively. This was needed since rateStartLine is the integer value for the first line that uses the current rate. The integer value indicates the center of the line, vertically, so we subtract 0.5 to get the top of the needed start pixel. References #4476.
2016-10-27 Jeannie Backer - Moved constructor documentation and destructor to cpp file. References #4476.
Definition at line 49 of file VariableLineScanCameraDetectorMap.h.
| double Isis::VariableLineScanCameraDetectorMap::exposureDuration |
( |
const double | sample, |
|
|
const double | line, |
|
|
const int | band ) const |
|
virtual |
This virtual method is for returning the exposure duration of a given pixel.
For a variable line scan camera, the exposure duration is assumed to be the line scan rate for the given line. Note, this may not be the actual exposure duration. The line scan rate is the time from the beginning of one line to the beginning of the next. The exposure duration is the time from the beginning of a line to the end of that line. So, if the end of a line is not the beginning of the next line, these two values will not be the same.
- Parameters
-
| sample | The sample of the desired pixel. |
| line | The line of the desired pixel. |
| band | The band of the desired pixel. |
- Returns
- double The exposure duration for the desired pixel in seconds.
- Exceptions
-
@TODO How do we get the actual exposure duration?
Reimplemented from Isis::LineScanCameraDetectorMap.
Definition at line 174 of file VariableLineScanCameraDetectorMap.cpp.
References lineRate().
| bool Isis::VariableLineScanCameraDetectorMap::SetParent |
( |
const double | sample, |
|
|
const double | line ) |
|
virtual |
Compute detector position from a parent image coordinate.
This method will compute the detector position from the parent line/sample coordinate. The parent line will be used to set the appropriate time in the parent camera.
- Parameters
-
| sample | Sample number in the parent image |
| line | Line number in the parent image |
- Returns
- conversion successful
Reimplemented from Isis::LineScanCameraDetectorMap.
Definition at line 96 of file VariableLineScanCameraDetectorMap.cpp.
References SetParent().
Referenced by SetParent().
| bool Isis::VariableLineScanCameraDetectorMap::SetParent |
( |
const double | sample, |
|
|
const double | line, |
|
|
const double | deltaT ) |
|
virtual |
| void Isis::LineScanCameraDetectorMap::SetStartTime |
( |
const double | etStart | ) |
|
|
inherited |
Reset the starting ephemeris time.
Use this method to reset the starting time of the top edge of the first line in the parent image. That is the time, prior to cropping, scaling, or padding. Usually this will not need to be done unless the time changes between bands.
- Parameters
-
| etStart | starting ephemeris time in seconds |
Definition at line 47 of file LineScanCameraDetectorMap.cpp.
References p_etStart.
Referenced by Isis::ThemisIrCamera::SetBand().