 |
Isis 3 Programmer Reference
|
|
Isis 3 Programmer Reference
|
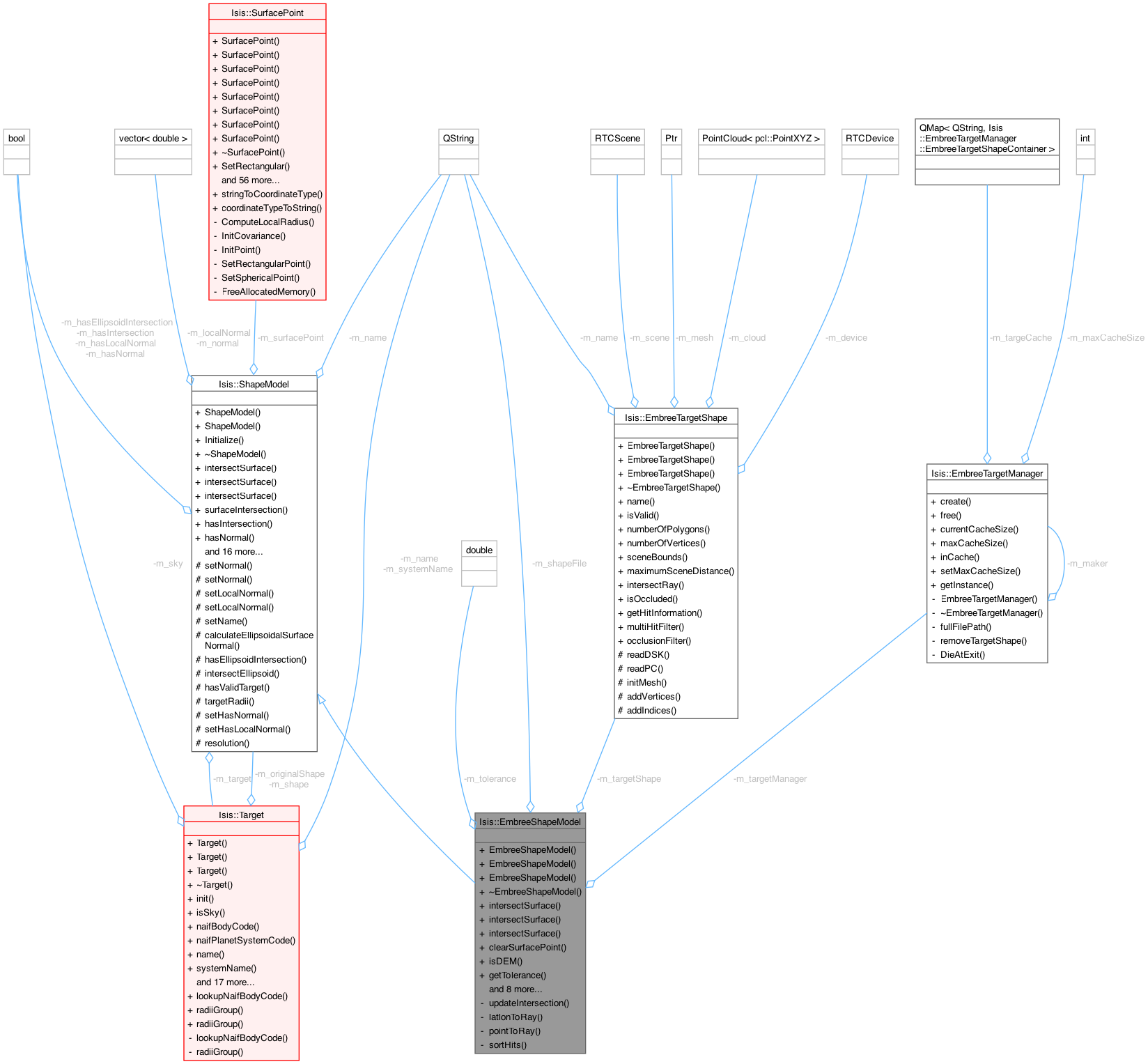
General purpose Embree ray tracing model. More...
#include <EmbreeShapeModel.h>

Public Member Functions | |
| EmbreeShapeModel () | |
| Default constructor sets type to a TIN. | |
| EmbreeShapeModel (Target *target, Pvl &pvl, EmbreeTargetManager *targetManager) | |
| Constructor provided for instantiation from an ISIS cube. | |
| EmbreeShapeModel (Target *target, const QString &shapefile, EmbreeTargetManager *targetManager) | |
| Constructor provided for instantiation from a file. | |
| virtual | ~EmbreeShapeModel () |
| Destructor that notifies the target shape manager that the target shape is no longer in use. | |
| virtual bool | intersectSurface (std::vector< double > observerPos, std::vector< double > lookDirection) |
| This method computes an intercept point given an observer location and look direction using the Embree model. | |
| virtual bool | intersectSurface (const Latitude &lat, const Longitude &lon, const std::vector< double > &observerPos, const bool &backCheck=true) |
| Compute intersection of surface vector direction from observer with occulusion. | |
| virtual bool | intersectSurface (const SurfacePoint &surfpt, const std::vector< double > &observerPos, const bool &backCheck=true) |
| Compute intersection of surface point from observer with occulusion. | |
| virtual void | clearSurfacePoint () |
| Flag that the ShapeModel does not have a surface point or normal. | |
| virtual bool | isDEM () const |
| Indicates that this shape model is not from a DEM. | |
| double | getTolerance () const |
| Get the tolerance used when checking if the stored surface point is visible. | |
| void | setTolerance (const double &tolerance) |
| Set the tolerance used when checking if the stored surface point is visible. | |
| virtual void | calculateDefaultNormal () |
| Return the surface normal of the ellipsoid as the default. | |
| virtual void | calculateLocalNormal (QVector< double * > cornerNeighborPoints) |
| Compute the normal for a local region of surface points. | |
| virtual void | calculateSurfaceNormal () |
| Return the surface normal of the ellipsoid. | |
| QVector< double > | ellipsoidNormal () |
| Compute the true surface normal vector of an ellipsoid. | |
| virtual double | incidenceAngle (const std::vector< double > &uB) |
| Computes and returns incidence angle, in degrees, given the illuminator position. | |
| virtual Distance | localRadius (const Latitude &lat, const Longitude &lon) |
| Determine radius at a given lat/lon grid point. | |
| virtual bool | isVisibleFrom (const std::vector< double > observerPos, const std::vector< double > lookDirection) |
| Check if the current internalized surface point is visible from an observer position and look direction. | |
| void | Initialize () |
| Initializes the ShapeModel private variables. | |
| virtual SurfacePoint * | surfaceIntersection () const |
| Returns the surface intersection for this ShapeModel. | |
| bool | hasIntersection () |
| Returns intersection status. | |
| bool | hasNormal () const |
| Returns surface point normal status. | |
| bool | hasLocalNormal () const |
| Returns surface point local normal status. | |
| virtual double | emissionAngle (const std::vector< double > &sB) |
| Computes and returns emission angle, in degrees, given the observer position. | |
| virtual double | phaseAngle (const std::vector< double > &sB, const std::vector< double > &uB) |
| Computes and returns phase angle, in degrees, given the positions of the observer and illuminator. | |
| QString | name () const |
| Gets the shape name. | |
| void | setHasIntersection (bool b) |
| Sets the flag to indicate whether this ShapeModel has an intersection. | |
| virtual void | setSurfacePoint (const SurfacePoint &surfacePoint) |
| Set surface intersection point. | |
| virtual std::vector< double > | normal () |
| Returns the surface normal at the current intersection point. | |
| virtual std::vector< double > | localNormal () |
| Returns the local surface normal at the current intersection point. | |
Protected Member Functions | |
| void | setNormal (const std::vector< double >) |
| Sets the surface normal for the currect intersection point. | |
| void | setNormal (const double a, const double b, const double c) |
| Sets the surface normal for the currect intersection point. | |
| void | setLocalNormal (const std::vector< double >) |
| Sets the local normal for the currect intersection point. | |
| void | setLocalNormal (const double a, const double b, const double c) |
| Sets the local normal for the currect intersection point. | |
| void | setName (QString name) |
| Sets the shape name. | |
| void | calculateEllipsoidalSurfaceNormal () |
| Calculates the ellipsoidal surface normal. | |
| bool | hasEllipsoidIntersection () |
| Returns the status of the ellipsoid model intersection. | |
| bool | intersectEllipsoid (const std::vector< double > observerPosRelativeToTarget, const std::vector< double > &observerLookVectorToTarget) |
| Finds the intersection point on the ellipsoid model using the given position of the observer (spacecraft) and direction vector from the observer to the target (body). | |
| bool | hasValidTarget () const |
| Returns the status of the target. | |
| std::vector< Distance > | targetRadii () const |
| Returns the radii of the body in km. | |
| void | setHasNormal (bool status) |
| Sets the flag to indicate whether this ShapeModel has a surface normal. | |
| void | setHasLocalNormal (bool status) |
| Sets the flag to indicate whether this ShapeModel has a local normal. | |
| double | resolution () |
| Convenience method to get pixel resolution (m/pix) at current intersection point. | |
Private Member Functions | |
| void | updateIntersection (const RayHitInformation hitInfo) |
| Update the ShapeModel given an intersection and normal. | |
| RTCMultiHitRay | latlonToRay (const Latitude &lat, const Longitude &lon) const |
| Given a latitude and longitude, create a ray that goes from the origin of the target through that latitude and longitude. | |
| RTCMultiHitRay | pointToRay (const SurfacePoint &point) const |
| Given a surface point, create a ray that goes from the origin of the target to the surface point. | |
| QVector< RayHitInformation > | sortHits (RTCMultiHitRay &ray, LinearAlgebra::Vector &observer) |
| Sort all intersections by a ray based on distance to a point. | |
Private Attributes | |
| EmbreeTargetShape * | m_targetShape |
| EmbreeTargetManager * | m_targetManager |
| !< The target body and Embree objects for intersection. | |
| double | m_tolerance |
| !< This manages EmbreeTargetShapes to allow for sharing of them between EmbreeShapeModels and deletes them when no longer needed. | |
| QString | m_shapeFile |
| !< Tolerance for checking visibility. | |
| bool | m_hasEllipsoidIntersection |
| Indicates the ellipsoid was successfully intersected. | |
| bool | m_hasIntersection |
| indicates good intersection exists | |
| bool | m_hasNormal |
| indicates normal has been computed | |
| bool | m_hasLocalNormal |
| indicates local normal has been computed | |
| std::vector< double > | m_normal |
| Surface normal of current intersection point. | |
| std::vector< double > | m_localNormal |
| Local normal of current intersection point. | |
| QString * | m_name |
| SurfacePoint * | m_surfacePoint |
| < Name of the shape | |
| Target * | m_target |
General purpose Embree ray tracing model.
2017-04-22 Jesse Mapel and Jeannie Backer - Original Version
2018-05-01 Christopher Combs - Removed emissionAngle function to fix issues with using ellipsoids to find normals. Fixes #5387.
Definition at line 37 of file EmbreeShapeModel.h.
| Isis::EmbreeShapeModel::EmbreeShapeModel | ( | ) |
Default constructor sets type to a TIN.
Definition at line 33 of file EmbreeShapeModel.cpp.
References Isis::ShapeModel::setName().
| Isis::EmbreeShapeModel::EmbreeShapeModel | ( | Target * | target, |
| Pvl & | pvl, | ||
| EmbreeTargetManager * | targetManager ) |
Constructor provided for instantiation from an ISIS cube.
This constructor is typically used for and ISIS cube that has been initialized by spiceinit. The target shape file will be read from the Pvl label.
| target | Target object describing the observed body |
| pvl | ISIS Cube label. The target shape file will be extracted from the Kernels group |
| targetManager | The target shape manager that will manage the target shape |
Definition at line 62 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetManager::create(), Isis::PvlContainer::hasKeyword(), m_shapeFile, m_targetManager, Isis::ShapeModel::setName(), Isis::PvlObject::Traverse, and Isis::IException::User.
| Isis::EmbreeShapeModel::EmbreeShapeModel | ( | Target * | target, |
| const QString & | shapefile, | ||
| EmbreeTargetManager * | targetManager ) |
Constructor provided for instantiation from a file.
| target | Target object describing the observed body |
| shapefile | The targe shape file to use |
| targetManager | The target shape manager that will manage the target shape |
Definition at line 109 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetManager::create(), m_shapeFile, m_targetManager, Isis::ShapeModel::setName(), and Isis::IException::User.
|
virtual |
Destructor that notifies the target shape manager that the target shape is no longer in use.
Definition at line 146 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetManager::free(), m_shapeFile, and m_targetManager.
|
virtual |
Return the surface normal of the ellipsoid as the default.
Implements Isis::ShapeModel.
Definition at line 516 of file EmbreeShapeModel.cpp.
References calculateSurfaceNormal().
Referenced by incidenceAngle().
|
protectedinherited |
Calculates the ellipsoidal surface normal.
Definition at line 142 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_hasNormal, Isis::ShapeModel::m_normal, Isis::IException::Programmer, and Isis::ShapeModel::surfaceIntersection().
|
virtual |
Compute the normal for a local region of surface points.
This method will calculate the surface normal of an assumed very local region of points. This method is provided to fullfil the specs of the ShapeModel class but this approach is not the most efficent means to accomplish this for a pre-exising intercept point. See setLocalNormalFromIntercept() for this.
The ShapeModel class makes the assumption that the four pixel corners of the center intercept point forms a plane from which a surface normal can be computed. For the Naif DSK plate model, we have already identified the plate (see m_intercept) from the DSK plate model (m_model) of the intercept point that provides it directly. That is what setLocalNormalFromIntercept() provides.
So, this implementation will compute the centroid of the neighboring points and make a determination if it intercepts the current intercept plate as defined by m_intercept - if it is valid. If it does not exist or does not intercept the plate, a new intercept point is computed and returned here.
| neighborPoints | Input body-fixed points to compute normal for |
Implements Isis::ShapeModel.
Definition at line 502 of file EmbreeShapeModel.cpp.
References Isis::ShapeModel::hasIntersection(), and Isis::IException::Programmer.
|
virtual |
Return the surface normal of the ellipsoid.
Implements Isis::ShapeModel.
Definition at line 525 of file EmbreeShapeModel.cpp.
References ellipsoidNormal(), and Isis::ShapeModel::setNormal().
Referenced by calculateDefaultNormal().
|
virtual |
Flag that the ShapeModel does not have a surface point or normal.
Reimplemented from Isis::ShapeModel.
Definition at line 385 of file EmbreeShapeModel.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::ShapeModel::setHasLocalNormal(), and Isis::ShapeModel::setHasNormal().
Referenced by intersectSurface(), intersectSurface(), and intersectSurface().
| QVector< double > Isis::EmbreeShapeModel::ellipsoidNormal | ( | ) |
Compute the true surface normal vector of an ellipsoid.
This routine is used instead of the one provided by the ShapeModel implementation. This is primarly because ShapeModel::calculateEllipsoidalSurfaceNormal() it is only suitable for a spheroid. This implementation is intended for irregular bodies so we expect triaxial ellipsoids.
Definition at line 546 of file EmbreeShapeModel.cpp.
References Isis::NaifStatus::CheckErrors(), Isis::ShapeModel::hasIntersection(), Isis::ShapeModel::hasValidTarget(), Isis::IException::Programmer, Isis::ShapeModel::surfaceIntersection(), and Isis::ShapeModel::targetRadii().
Referenced by calculateSurfaceNormal().
|
virtualinherited |
Computes and returns emission angle, in degrees, given the observer position.
Emission Angle: The angle between the surface normal vector at the intersection point and the vector from the intersection point to the observer (usually the spacecraft). The emission angle varies from 0 degrees when the observer is viewing the sub-spacecraft point (nadir viewing) to 90 degrees when the intercept is tangent to the surface of the target body. Thus, higher values of emission angle indicate more oblique viewing of the target.
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
Reimplemented in Isis::PlaneShape.
Definition at line 187 of file ShapeModel.cpp.
References Isis::ShapeModel::hasNormal(), Isis::ShapeModel::m_normal, Isis::RAD2DEG, and Isis::ShapeModel::surfaceIntersection().
Referenced by Isis::ShapeModel::isVisibleFrom().
| double Isis::EmbreeShapeModel::getTolerance | ( | ) | const |
Get the tolerance used when checking if the stored surface point is visible.
Definition at line 734 of file EmbreeShapeModel.cpp.
References m_tolerance.
Referenced by isVisibleFrom().
|
protectedinherited |
Returns the status of the ellipsoid model intersection.
Definition at line 215 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasEllipsoidIntersection.
|
inherited |
Returns intersection status.
Definition at line 370 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::BulletShapeModel::calculateLocalNormal(), Isis::EllipsoidShape::calculateLocalNormal(), calculateLocalNormal(), Isis::NaifDskShape::calculateLocalNormal(), Isis::BulletShapeModel::ellipsoidNormal(), ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), intersectSurface(), Isis::BulletShapeModel::intersectSurface(), intersectSurface(), Isis::BulletShapeModel::intersectSurface(), Isis::DemShape::intersectSurface(), intersectSurface(), Isis::EquatorialCylindricalShape::intersectSurface(), Isis::ShapeModel::isVisibleFrom(), Isis::CSMCamera::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::BulletShapeModel::setLocalNormalFromIntercept(), and Isis::NaifDskShape::setLocalNormalFromIntercept().
|
inherited |
Returns surface point local normal status.
Definition at line 390 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasLocalNormal.
|
inherited |
Returns surface point normal status.
Definition at line 380 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasNormal.
Referenced by Isis::ShapeModel::emissionAngle(), incidenceAngle(), and Isis::ShapeModel::incidenceAngle().
|
protectedinherited |
Returns the status of the target.
If it is NULL, this method returns false.
Definition at line 479 of file ShapeModel.cpp.
Referenced by Isis::BulletShapeModel::ellipsoidNormal(), ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), Isis::ShapeModel::resolution(), and Isis::ShapeModel::targetRadii().
|
virtual |
Computes and returns incidence angle, in degrees, given the illuminator position.
The surface normal vector is calculated using an ellipsoid, not the local normal of the actual target shape.
Incidence Angle: The angle between the surface normal vector at the intersection point and the vector from the intersection point to the illuminator (usually the sun).
Note: this method does not use the surface model.
| illuminatorBodyFixedPosition | Three dimensional position for the illuminator, in the body-fixed coordinate system. |
Reimplemented from Isis::ShapeModel.
Definition at line 597 of file EmbreeShapeModel.cpp.
References calculateDefaultNormal(), Isis::ShapeModel::hasNormal(), Isis::ShapeModel::incidenceAngle(), Isis::ShapeModel::localNormal(), Isis::ShapeModel::normal(), and Isis::ShapeModel::setNormal().
|
inherited |
Initializes the ShapeModel private variables.
Definition at line 65 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasEllipsoidIntersection, Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_hasLocalNormal, Isis::ShapeModel::m_hasNormal, Isis::ShapeModel::m_localNormal, Isis::ShapeModel::m_normal, and Isis::ShapeModel::m_surfacePoint.
Referenced by Isis::ShapeModel::ShapeModel(), and Isis::ShapeModel::ShapeModel().
|
protectedinherited |
Finds the intersection point on the ellipsoid model using the given position of the observer (spacecraft) and direction vector from the observer to the target (body).
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
| observerLookVectorToTarget | Three dimensional direction vector from the observer to the target. |
Definition at line 269 of file ShapeModel.cpp.
References Isis::NaifStatus::CheckErrors(), Isis::ShapeModel::clearSurfacePoint(), Isis::SurfacePoint::FromNaifArray(), Isis::ShapeModel::m_hasEllipsoidIntersection, Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_surfacePoint, and Isis::ShapeModel::targetRadii().
Referenced by Isis::DemShape::intersectSurface(), and Isis::EllipsoidShape::intersectSurface().
|
virtual |
Compute intersection of surface vector direction from observer with occulusion.
This method computes a surface intersection point at a given latitude and longitude. All surface points at that latitude and longitude are collected and then the intersect that is non-occluded and closest to the observer is saved. The unit surface normal is also saved.
If occlusion is not checked, then the closest intersection to the observer is saved along with the unit surface normal.
| lat | The latitude of the surface intersection |
| lon | The longitude of the surface intersection |
| observerPos | The position of the observer for occlusion checks |
| backCheck | If occlusion should be checked |
Reimplemented from Isis::ShapeModel.
Definition at line 207 of file EmbreeShapeModel.cpp.
References clearSurfacePoint(), Isis::ShapeModel::hasIntersection(), Isis::EmbreeTargetShape::intersectRay(), Isis::EmbreeTargetShape::isOccluded(), latlonToRay(), Isis::LinearAlgebra::magnitude(), Isis::LinearAlgebra::normalize(), sortHits(), updateIntersection(), and Isis::LinearAlgebra::vector().
|
virtual |
Compute intersection of surface point from observer with occulusion.
Compute the intersection point closest to a surface point. If occlusion is checked, then the intersection that is both closest to the surface point and non-occluded is saved. If occlusion is not checked, then the intersection closest to the surface point is saved.
The unit surface normal is also saved when an intersection is saved.
| surfpt | Surface intercept point |
| observerPos | Observer to check occlusion |
| backCheck | If occlusion should be checked |
Reimplemented from Isis::ShapeModel.
Definition at line 285 of file EmbreeShapeModel.cpp.
References clearSurfacePoint(), Isis::ShapeModel::hasIntersection(), Isis::EmbreeTargetShape::intersectRay(), Isis::EmbreeTargetShape::isOccluded(), Isis::LinearAlgebra::magnitude(), Isis::LinearAlgebra::normalize(), pointToRay(), sortHits(), updateIntersection(), and Isis::LinearAlgebra::vector().
|
virtual |
This method computes an intercept point given an observer location and look direction using the Embree model.
This also saves the surface normal.
| observerPos | Position of observer in body-fixed kilometers |
| lookDirection | Unit look direction from the observer |
Implements Isis::ShapeModel.
Definition at line 162 of file EmbreeShapeModel.cpp.
References clearSurfacePoint(), Isis::EmbreeTargetShape::getHitInformation(), Isis::ShapeModel::hasIntersection(), Isis::EmbreeTargetShape::intersectRay(), Isis::ShapeModel::setHasIntersection(), and updateIntersection().
|
virtual |
Indicates that this shape model is not from a DEM.
Since this method returns false for this class, the Camera class will not calculate the local normal using neighbor points.
Implements Isis::ShapeModel.
Definition at line 435 of file EmbreeShapeModel.cpp.
|
virtual |
Check if the current internalized surface point is visible from an observer position and look direction.
A new intersection is calculated using the observer and look direction. If, the distance between the surface point and new intersection is less than the tolerance, then the surface point is considered to be visible.
| observerPos | The position of the observer |
| lookDirection | The look direction of the observer |
Reimplemented from Isis::ShapeModel.
Definition at line 450 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetShape::getHitInformation(), getTolerance(), Isis::EmbreeTargetShape::intersectRay(), Isis::LinearAlgebra::magnitude(), Isis::ShapeModel::surfaceIntersection(), and Isis::LinearAlgebra::vector().
|
private |
Given a latitude and longitude, create a ray that goes from the origin of the target through that latitude and longitude.
The ray length is set to the maximum distance in the scene to ensure that it intersects all points at that latitude and longitude.
| lat | The latitude for the ray to pass through |
| lon | The longitude for the ray to pass through |
Definition at line 634 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetShape::maximumSceneDistance().
Referenced by intersectSurface(), and localRadius().
|
virtualinherited |
Returns the local surface normal at the current intersection point.
Note: This method will throw an error if the normal doesn't exist. Use the hasLocalNormal() method to verify before calling this method.
Definition at line 432 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasLocalNormal, Isis::ShapeModel::m_localNormal, and Isis::IException::Unknown.
Referenced by Isis::EllipsoidShape::calculateSurfaceNormal(), and incidenceAngle().
|
virtual |
Determine radius at a given lat/lon grid point.
@NOTE this call does not update the internal state of the intercept point. Use intersectSurface(lat, lon) for that.
Implements Isis::ShapeModel.
Definition at line 404 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetShape::getHitInformation(), Isis::EmbreeTargetShape::intersectRay(), Isis::Distance::Kilometers, latlonToRay(), and Isis::LinearAlgebra::magnitude().
|
inherited |
Gets the shape name.
Definition at line 620 of file ShapeModel.cpp.
Referenced by Isis::Spice::init(), Isis::Target::restoreShape(), Isis::Camera::SetGround(), Isis::CSMCamera::SetGround(), Isis::Camera::SetImageMapProjection(), and Isis::ShapeModel::setName().
|
virtualinherited |
Returns the surface normal at the current intersection point.
Note: This method will throw an error if the normal doesn't exist. Use the hasNormal() method to verify before calling this method.
Definition at line 413 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasNormal, Isis::ShapeModel::m_normal, and Isis::IException::Unknown.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::DemShape::calculateLocalNormal(), Isis::EllipsoidShape::calculateLocalNormal(), incidenceAngle(), Isis::IsisShape::intersect(), Isis::ShapeModel::setLocalNormal(), Isis::BulletShapeModel::setLocalNormalFromIntercept(), Isis::ShapeModel::setNormal(), and Isis::BulletShapeModel::updateShapeModel().
|
virtualinherited |
Computes and returns phase angle, in degrees, given the positions of the observer and illuminator.
Phase Angle: The angle between the vector from the intersection point to the observer (usually the spacecraft) and the vector from the intersection point to the illuminator (usually the sun).
| observerBodyFixedPosition | Three dimensional position of the observer, in the coordinate system of the target body. |
| illuminatorBodyFixedPosition | Three dimensional position for the illuminator, in the body-fixed coordinate system. |
Definition at line 326 of file ShapeModel.cpp.
References Isis::RAD2DEG, and Isis::ShapeModel::surfaceIntersection().
|
private |
Given a surface point, create a ray that goes from the origin of the target to the surface point.
| surfpt | The surface point for the ray to pass through |
Definition at line 664 of file EmbreeShapeModel.cpp.
References Isis::RTCMultiHitRay::lastHit, Isis::LinearAlgebra::normalize(), and Isis::LinearAlgebra::vector().
Referenced by intersectSurface().
|
protectedinherited |
Convenience method to get pixel resolution (m/pix) at current intersection point.
Definition at line 681 of file ShapeModel.cpp.
References Isis::ShapeModel::hasValidTarget(), Isis::ShapeModel::m_hasIntersection, Isis::IException::Programmer, Isis::Spice::resolution(), and Isis::Target::spice().
Referenced by Isis::DemShape::intersectSurface().
|
inherited |
Sets the flag to indicate whether this ShapeModel has an intersection.
| b | Indicates whether there is an intersection. |
Definition at line 631 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::setHasLocalNormal(), and Isis::ShapeModel::setHasNormal().
Referenced by Isis::ShapeModel::clearSurfacePoint(), Isis::DemShape::intersectSurface(), intersectSurface(), Isis::EquatorialCylindricalShape::intersectSurface(), Isis::PlaneShape::intersectSurface(), Isis::Camera::RawFocalPlanetoImage(), Isis::CSMCamera::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::Camera::SetImageMapProjection(), and updateIntersection().
|
protectedinherited |
Sets the flag to indicate whether this ShapeModel has a local normal.
| status | Indicates whether there is a normal. |
Definition at line 670 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasLocalNormal.
Referenced by Isis::DemShape::calculateLocalNormal(), Isis::EllipsoidShape::calculateLocalNormal(), clearSurfacePoint(), Isis::ShapeModel::setHasIntersection(), Isis::ShapeModel::setSurfacePoint(), and Isis::BulletShapeModel::updateShapeModel().
|
protectedinherited |
Sets the flag to indicate whether this ShapeModel has a surface normal.
| status | Indicates whether there is a normal. |
Definition at line 660 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasNormal.
Referenced by Isis::DemShape::calculateDefaultNormal(), clearSurfacePoint(), Isis::ShapeModel::setHasIntersection(), and Isis::ShapeModel::setSurfacePoint().
|
protectedinherited |
Sets the local normal for the currect intersection point.
Note: This method will throw an error if this ShapeModel doesn't have and intersection. Use the hasIntersection() method to verify before calling this method.
| a | First coordinate value for the three dimensional local normal. |
| b | Second coordinate value for the three dimensional local normal. |
| c | Third coordinate value for the three dimensional local normal. |
Definition at line 590 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_hasLocalNormal, Isis::ShapeModel::m_localNormal, and Isis::IException::Unknown.
|
protectedinherited |
Sets the local normal for the currect intersection point.
Note: This method will throw an error if this ShapeModel doesn't have an intersection. Use the hasIntersection() method to verify before calling this method.
| normal | Three dimensional local normal vector. |
Definition at line 539 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_hasLocalNormal, Isis::ShapeModel::m_localNormal, Isis::ShapeModel::normal(), and Isis::IException::Unknown.
Referenced by Isis::DemShape::calculateLocalNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::BulletShapeModel::setLocalNormalFromIntercept(), Isis::NaifDskShape::setLocalNormalFromIntercept(), and Isis::BulletShapeModel::updateShapeModel().
|
protectedinherited |
Sets the shape name.
| name | The name of the ShapeModel. |
Definition at line 609 of file ShapeModel.cpp.
References Isis::ShapeModel::name().
Referenced by Isis::BulletShapeModel::BulletShapeModel(), Isis::BulletShapeModel::BulletShapeModel(), Isis::BulletShapeModel::BulletShapeModel(), Isis::DemShape::DemShape(), Isis::DemShape::DemShape(), Isis::EllipsoidShape::EllipsoidShape(), Isis::EllipsoidShape::EllipsoidShape(), EmbreeShapeModel(), EmbreeShapeModel(), EmbreeShapeModel(), Isis::EquatorialCylindricalShape::EquatorialCylindricalShape(), Isis::NaifDskShape::NaifDskShape(), Isis::NaifDskShape::NaifDskShape(), Isis::PlaneShape::PlaneShape(), Isis::PlaneShape::PlaneShape(), and Isis::PlaneShape::PlaneShape().
|
protectedinherited |
Sets the surface normal for the currect intersection point.
Note: This method will throw an error if this ShapeModel doesn't have and intersection. Use the hasIntersection() method to verify before calling this method.
| a | First coordinate value for the three dimensional surface normal. |
| b | Second coordinate value for the three dimensional surface normal. |
| c | Third coordinate value for the three dimensional surface normal. |
Definition at line 564 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_hasNormal, Isis::ShapeModel::m_normal, and Isis::IException::Unknown.
|
protectedinherited |
Sets the surface normal for the currect intersection point.
Note: This method will throw an error if this ShapeModel doesn't have an intersection. Use the hasIntersection() method to verify before calling this method.
| normal | Three dimensional surface normal vector. |
Definition at line 517 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_hasNormal, Isis::ShapeModel::m_normal, Isis::ShapeModel::normal(), and Isis::IException::Unknown.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::BulletShapeModel::calculateSurfaceNormal(), Isis::EllipsoidShape::calculateSurfaceNormal(), calculateSurfaceNormal(), Isis::NaifDskShape::calculateSurfaceNormal(), incidenceAngle(), Isis::PlaneShape::intersectSurface(), and updateIntersection().
|
virtualinherited |
Set surface intersection point.
| surfacePoint | Position coordinate for the surface point. |
Reimplemented in Isis::BulletShapeModel.
Definition at line 643 of file ShapeModel.cpp.
References Isis::ShapeModel::m_hasIntersection, Isis::ShapeModel::m_surfacePoint, Isis::ShapeModel::setHasLocalNormal(), and Isis::ShapeModel::setHasNormal().
Referenced by Isis::ShapeModel::intersectSurface(), Isis::NaifDskShape::intersectSurface(), updateIntersection(), and Isis::BulletShapeModel::updateShapeModel().
| void Isis::EmbreeShapeModel::setTolerance | ( | const double & | tolerance | ) |
Set the tolerance used when checking if the stored surface point is visible.
| tolerance | The new tolerance in kilometers |
Definition at line 747 of file EmbreeShapeModel.cpp.
References m_tolerance.
|
private |
Sort all intersections by a ray based on distance to a point.
All intersections are first stored in RayHitInformation objects and then sorted.
| ray | The ray to sort intersections for. The ray must already be intersected with the target shape by EmbreeTargetShape::intersectRay. |
| observer | The point to sort the intersections based on. |
Definition at line 710 of file EmbreeShapeModel.cpp.
References Isis::EmbreeTargetShape::getHitInformation(), and Isis::LinearAlgebra::magnitude().
Referenced by intersectSurface(), and intersectSurface().
|
virtualinherited |
Returns the surface intersection for this ShapeModel.
Definition at line 360 of file ShapeModel.cpp.
References Isis::ShapeModel::m_surfacePoint.
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::ShapeModel::calculateEllipsoidalSurfaceNormal(), Isis::DemShape::calculateLocalNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::Sensor::Coordinate(), Isis::BulletShapeModel::ellipsoidNormal(), ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), Isis::PlaneShape::emissionAngle(), Isis::ShapeModel::emissionAngle(), Isis::PlaneShape::incidenceAngle(), Isis::ShapeModel::incidenceAngle(), Isis::IsisShape::intersect(), Isis::DemShape::intersectSurface(), Isis::EquatorialCylindricalShape::intersectSurface(), Isis::PlaneShape::intersectSurface(), isVisibleFrom(), Isis::PlaneShape::localRadius(), Isis::ShapeModel::phaseAngle(), and Isis::Sensor::SetGroundLocal().
|
protectedinherited |
Returns the radii of the body in km.
The radii are obtained from the target. Note: This method will throw an error if the ShapeModel does not have a valid target. Use the hasValidTarget() method to verify before calling this method.
Definition at line 495 of file ShapeModel.cpp.
References Isis::ShapeModel::hasValidTarget(), Isis::IException::Programmer, and Isis::Target::radii().
Referenced by Isis::DemShape::calculateDefaultNormal(), Isis::EllipsoidShape::calculateLocalNormal(), Isis::BulletShapeModel::ellipsoidNormal(), ellipsoidNormal(), Isis::NaifDskShape::ellipsoidNormal(), Isis::ShapeModel::intersectEllipsoid(), Isis::EquatorialCylindricalShape::intersectSurface(), and Isis::EllipsoidShape::localRadius().
|
private |
Update the ShapeModel given an intersection and normal.
| hitinfo | The intersection and normal to internalize |
Definition at line 359 of file EmbreeShapeModel.cpp.
References Isis::ShapeModel::setHasIntersection(), Isis::ShapeModel::setNormal(), and Isis::ShapeModel::setSurfacePoint().
Referenced by intersectSurface(), intersectSurface(), and intersectSurface().
|
privateinherited |
Indicates the ellipsoid was successfully intersected.
Definition at line 184 of file ShapeModel.h.
Referenced by Isis::ShapeModel::clearSurfacePoint(), Isis::ShapeModel::hasEllipsoidIntersection(), Isis::ShapeModel::Initialize(), and Isis::ShapeModel::intersectEllipsoid().
|
privateinherited |
indicates good intersection exists
Definition at line 185 of file ShapeModel.h.
Referenced by Isis::ShapeModel::calculateEllipsoidalSurfaceNormal(), Isis::ShapeModel::hasIntersection(), Isis::ShapeModel::Initialize(), Isis::ShapeModel::intersectEllipsoid(), Isis::ShapeModel::resolution(), Isis::ShapeModel::setHasIntersection(), Isis::ShapeModel::setLocalNormal(), Isis::ShapeModel::setLocalNormal(), Isis::ShapeModel::setNormal(), Isis::ShapeModel::setNormal(), and Isis::ShapeModel::setSurfacePoint().
|
privateinherited |
indicates local normal has been computed
Definition at line 187 of file ShapeModel.h.
Referenced by Isis::ShapeModel::hasLocalNormal(), Isis::ShapeModel::Initialize(), Isis::ShapeModel::localNormal(), Isis::ShapeModel::setHasLocalNormal(), Isis::ShapeModel::setLocalNormal(), and Isis::ShapeModel::setLocalNormal().
|
privateinherited |
indicates normal has been computed
Definition at line 186 of file ShapeModel.h.
Referenced by Isis::ShapeModel::calculateEllipsoidalSurfaceNormal(), Isis::ShapeModel::hasNormal(), Isis::ShapeModel::Initialize(), Isis::ShapeModel::normal(), Isis::ShapeModel::setHasNormal(), Isis::ShapeModel::setNormal(), and Isis::ShapeModel::setNormal().
|
privateinherited |
Local normal of current intersection point.
Definition at line 189 of file ShapeModel.h.
Referenced by Isis::ShapeModel::Initialize(), Isis::ShapeModel::localNormal(), Isis::ShapeModel::setLocalNormal(), and Isis::ShapeModel::setLocalNormal().
|
privateinherited |
Definition at line 190 of file ShapeModel.h.
|
privateinherited |
Surface normal of current intersection point.
Definition at line 188 of file ShapeModel.h.
Referenced by Isis::ShapeModel::calculateEllipsoidalSurfaceNormal(), Isis::ShapeModel::emissionAngle(), Isis::ShapeModel::incidenceAngle(), Isis::ShapeModel::Initialize(), Isis::ShapeModel::normal(), Isis::ShapeModel::setNormal(), and Isis::ShapeModel::setNormal().
|
private |
!< Tolerance for checking visibility.
Definition at line 100 of file EmbreeShapeModel.h.
Referenced by EmbreeShapeModel(), EmbreeShapeModel(), and ~EmbreeShapeModel().
|
privateinherited |
< Name of the shape
Current intersection point
Definition at line 191 of file ShapeModel.h.
Referenced by Isis::ShapeModel::Initialize(), Isis::ShapeModel::intersectEllipsoid(), Isis::ShapeModel::setSurfacePoint(), Isis::ShapeModel::surfaceIntersection(), and Isis::ShapeModel::~ShapeModel().
|
privateinherited |
Definition at line 193 of file ShapeModel.h.
|
private |
!< The target body and Embree objects for intersection.
This is owned and managed by the target manager and will be deleted by that.
Definition at line 95 of file EmbreeShapeModel.h.
Referenced by EmbreeShapeModel(), EmbreeShapeModel(), and ~EmbreeShapeModel().
|
private |
Definition at line 91 of file EmbreeShapeModel.h.
|
private |
!< This manages EmbreeTargetShapes to allow for sharing of them between EmbreeShapeModels and deletes them when no longer needed.
Definition at line 99 of file EmbreeShapeModel.h.
Referenced by getTolerance(), and setTolerance().