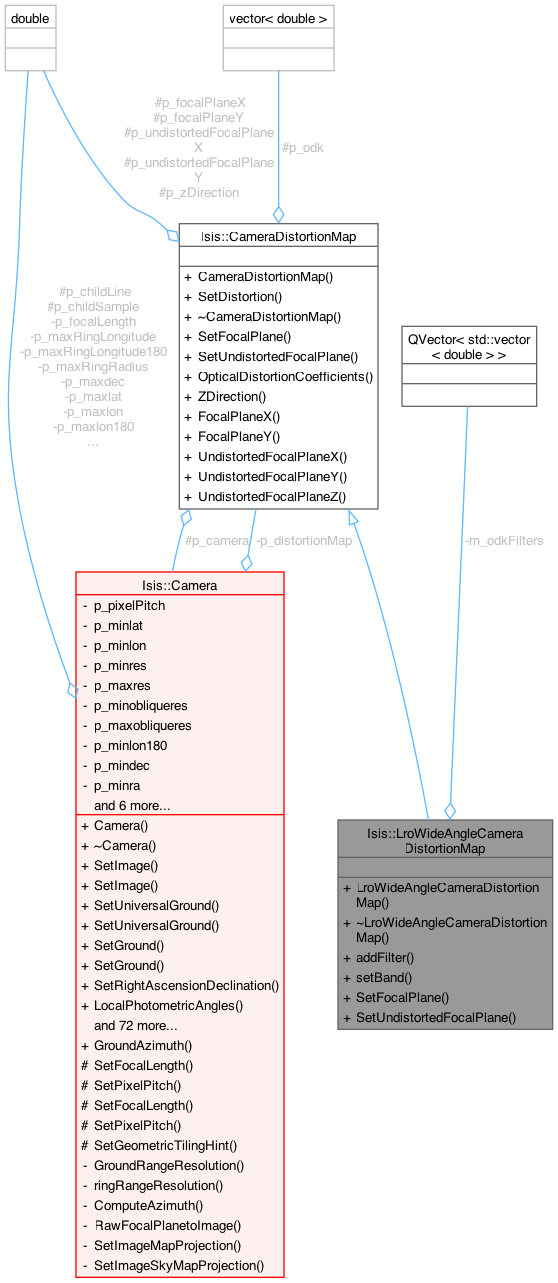
Distort/undistort focal plane coordinates.
Creates a map for adding/removing optical distortions from the focal plane of a camera.
- See also
- LroWideAngleCamera
- Author
- 2008-08-22 Steven Lambright
- History
2009-11-19 Kris Becker - Changed the convergence tolerance from 1/10,000 of a pixel to 1/100 of a pixel
2010-05-05 Ken Edmundson - Corrected distorted and undistorted computations; Fix requires coefficients in the lro_instruments_v??.ti to be negative (essentially matches what is reported in the calibration document); removed the GuessDx method as it was not used; updated the UV boresight in the IK based upon analysis of the VIS and UV.
2012-07-06 Debbie A. Cook, Updated Spice members to be more compliant with Isis coding standards. References #972.
2011-08-30 Kris Becker - Implemented new decentering distortion model. This becomes version 3 of the camera model
2012-03-06 Kris Becker - Added distortion model tolerance parameter
2013-03-07 Kris Becker - Modified to implement new distortion model with three terms and allow for band independant distortions.
Definition at line 47 of file LroWideAngleCameraDistortionMap.h.
| Isis::LroWideAngleCameraDistortionMap::LroWideAngleCameraDistortionMap |
( |
Camera * | parent, |
|
|
int | naifIkCode ) |
| void Isis::LroWideAngleCameraDistortionMap::addFilter |
( |
int | naifIkCode | ) |
|
Add an additional set of parameters for a given LROC/WAC filter.
This method will read the parameters for LROC/WAC filter as indicated by the IK code provided. It will create a vector of these parameters and append them to the band list.
The filters added should correspond directly to the order in which the filters are physically stored in the ISIS cube (or the virtually selected bands).
- Author
- 2013-03-07 Kris Becker
- Parameters
-
| naifIkCode | NAIF IK code for the desired filter to add. |
Definition at line 59 of file LroWideAngleCameraDistortionMap.cpp.
References Isis::CameraDistortionMap::p_camera.
Referenced by Isis::LroWideAngleCamera::LroWideAngleCamera().
| void Isis::LroWideAngleCameraDistortionMap::setBand |
( |
int | vband | ) |
|
| void Isis::CameraDistortionMap::SetDistortion |
( |
int | naifIkCode | ) |
|
|
virtualinherited |
Load distortion coefficients.
This method loads the distortion coefficients from the instrument kernel. The coefficients in the NAIF instrument kernel are expected to be in the form of:
INSxxxxx_OD_K = ( coef1, coef2, ..., coefN)
where xxxxx is the instrument code (always a negative number)
These coefficient will be used to convert from focal plane x,y to undistorted x,y as follows (add equation here)
- Parameters
-
| naifIkCode | Code to search for in instrument kernel |
- Todo
Generalize to read variable number of coefficients
Add latex equation to the documentation
Reimplemented in Isis::JunoDistortionMap, Isis::KaguyaMiCameraDistortionMap, Isis::LoHighDistortionMap, Isis::LoMediumDistortionMap, Isis::LroNarrowAngleDistortionMap, Isis::OsirisRexOcamsDistortionMap, and Isis::TaylorCameraDistortionMap.
Definition at line 58 of file CameraDistortionMap.cpp.
References p_camera, p_odk, and Isis::toString().
Referenced by Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CTXCamera::CTXCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::LoHighDistortionMap::SetDistortion(), and Isis::LoMediumDistortionMap::SetDistortion().
| double Isis::CameraDistortionMap::UndistortedFocalPlaneZ |
( |
| ) |
const |
|
inherited |