|
| | MocWideAngleDetectorMap (Camera *parent, const double etStart, const double lineRate, MocLabels *moclab) |
| | Construct a detector map for line scan cameras.
|
| |
| virtual | ~MocWideAngleDetectorMap () |
| | Destructor.
|
| |
| virtual bool | SetParent (const double sample, const double line) |
| |
| virtual bool | SetDetector (const double sample, const double line) |
| | Constructor for MocWideAngleDetectorMap class.
|
| |
| void | SetStartTime (const double etStart) |
| | Reset the starting ephemeris time.
|
| |
| void | SetLineRate (const double lineRate) |
| | Reset the line rate.
|
| |
| double | LineRate () const |
| | Access the time, in seconds, between scan lines.
|
| |
| virtual double | exposureDuration (const double sample, const double line, const int band) const |
| | @breif This virtual method is for returning the exposure duration of a pixel.
|
| |
| virtual bool | SetParent (const double sample, const double line, const double deltaT) |
| | Compute detector position from a parent image coordinate.
|
| |
| double | StartTime () const |
| | Access the starting time at the top edge of the first line in the parent image.
|
| |
| double | AdjustedStartingSample () const |
| | Return the starting detector sample adjusted for summation.
|
| |
| double | AdjustedStartingLine () const |
| | Return the starting detector line adjusted for summation.
|
| |
| double | ParentSample () const |
| | Return parent sample.
|
| |
| double | ParentLine () const |
| | Return parent line.
|
| |
| double | DetectorSample () const |
| | Return detector sample.
|
| |
| double | DetectorLine () const |
| | Return detector line.
|
| |
| void | SetStartingDetectorSample (const double sample) |
| | Set the starting detector sample.
|
| |
| void | SetStartingDetectorLine (const double line) |
| | Set the starting detector line.
|
| |
| void | SetDetectorSampleSumming (const double summing) |
| | Set sample summing mode.
|
| |
| void | SetDetectorLineSumming (const double summing) |
| | Set line summing mode.
|
| |
| virtual double | SampleScaleFactor () const |
| | Return scaling factor for computing sample resolution.
|
| |
| virtual double | LineScaleFactor () const |
| | Return scaling factor for computing line resolution.
|
| |
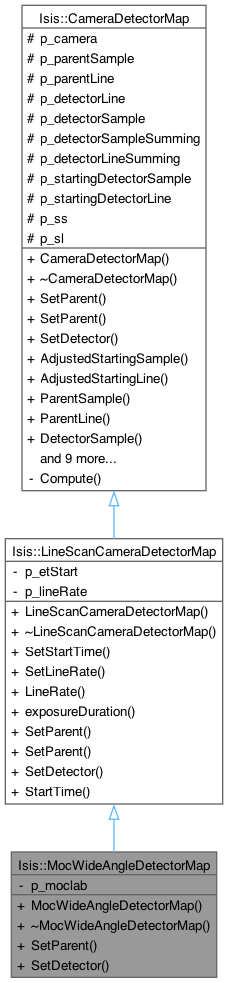
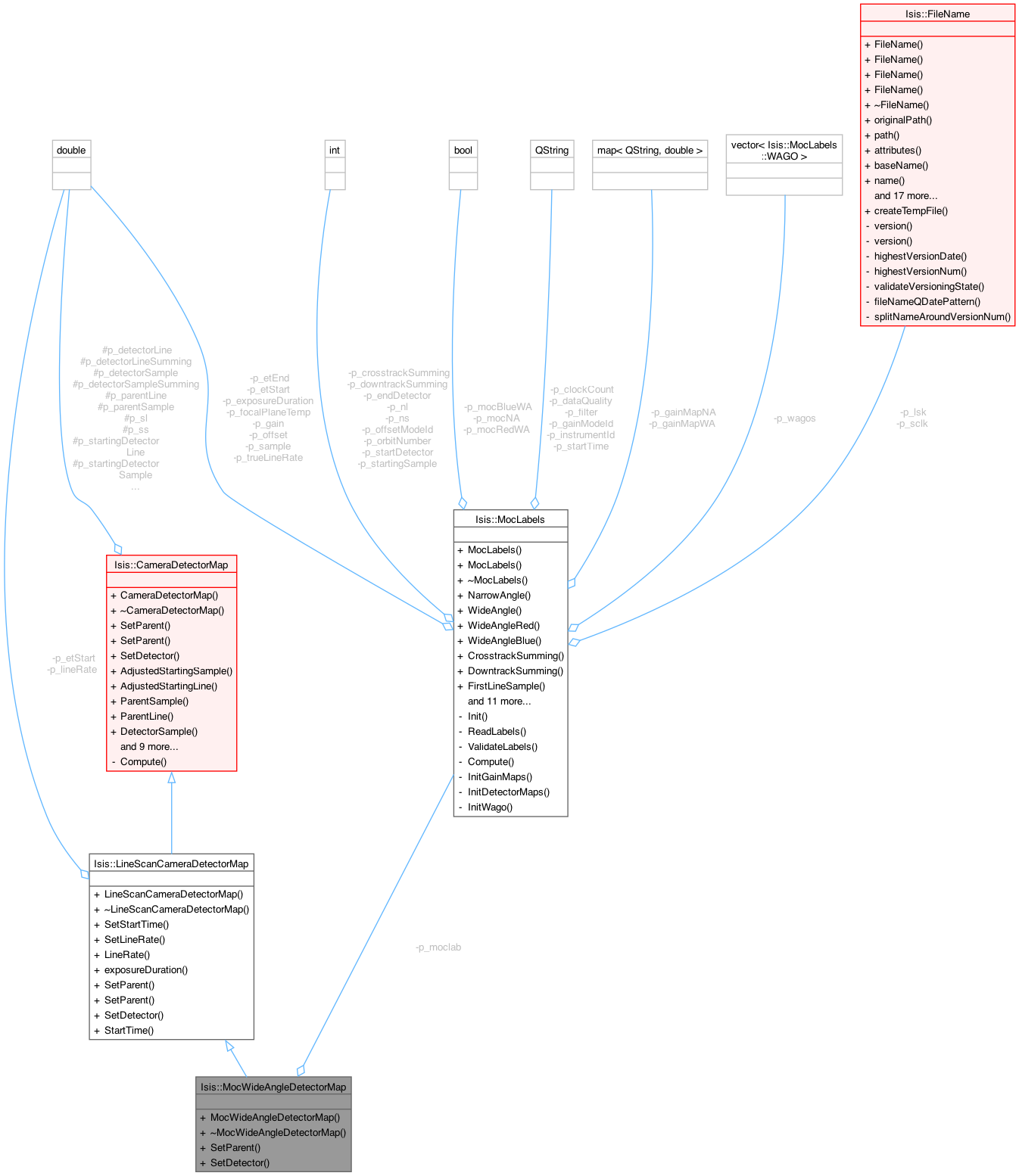
Convert between parent image coordinates and detector coordinates.
This class is used to convert between parent dector coordinates (sample/line) and detector coordinates for a the Moc wide angle camera. It is needed to handle variable summing modes
- See also
- Camera
- Author
- 2005-02-01 Jeff Anderson
- History
2005-02-01 Jeff Anderson - Original version
2011-05-03 Jeannie Walldren - Removed Mgs namespace wrap.
Definition at line 32 of file MocWideAngleDetectorMap.h.
| double Isis::LineScanCameraDetectorMap::exposureDuration |
( |
const double | sample, |
|
|
const double | line, |
|
|
const int | band ) const |
|
virtualinherited |
@breif This virtual method is for returning the exposure duration of a pixel.
For a fixed rate line scan camera this will return the line scan rate. Note that this may not be the exact same thing as the exposure duration. If there is some amount of padding between exposures, then the line scan rate is actually the exposure duration plus that padding.
- Parameters
-
| sample | The sample of the desired pixel. |
| line | The line of the desired pixel. |
| band | The band of the desired pixel. |
- Returns
- double The exposure duration for the desired pixel in seconds.
- See also
- LineRate
@TODO Add a way to account for the padding described above. Push frame cameras handle this by having a separate exposure duration member that can be set by individual camera models. Then, if the exposure duration member is not it's default value (0) return it instead of the line rate.
Reimplemented from Isis::CameraDetectorMap.
Reimplemented in Isis::VariableLineScanCameraDetectorMap.
Definition at line 175 of file LineScanCameraDetectorMap.cpp.
References LineRate().
| bool Isis::LineScanCameraDetectorMap::SetParent |
( |
const double | sample, |
|
|
const double | line, |
|
|
const double | deltaT ) |
|
virtualinherited |
| void Isis::LineScanCameraDetectorMap::SetStartTime |
( |
const double | etStart | ) |
|
|
inherited |
Reset the starting ephemeris time.
Use this method to reset the starting time of the top edge of the first line in the parent image. That is the time, prior to cropping, scaling, or padding. Usually this will not need to be done unless the time changes between bands.
- Parameters
-
| etStart | starting ephemeris time in seconds |
Definition at line 47 of file LineScanCameraDetectorMap.cpp.
References p_etStart.
Referenced by Isis::ThemisIrCamera::SetBand().