|
| | RadarPulseMap (Camera *parent, const double etStart, const double lineRate) |
| | Construct a detector map for line scan cameras.
|
| |
| virtual | ~RadarPulseMap () |
| | Destructor.
|
| |
| void | SetStartTime (const double etStart) |
| | Reset the starting ephemeris time.
|
| |
| void | SetLineRate (const double lineRate) |
| | Reset the line rate.
|
| |
| double | LineRate () const |
| | Return the time in seconds between scan lines.
|
| |
| virtual bool | SetParent (const double sample, const double line) |
| | Compute radar (sample/time)from a alpha image coordinate.
|
| |
| virtual bool | SetDetector (const double sample, const double line) |
| | Compute alpha position from a detector coordinate.
|
| |
| void | SetXAxisTimeDependent (bool on) |
| | Set the time dependent axis, if never called y is the time dependent axis.
|
| |
| virtual bool | SetParent (const double sample, const double line, const double deltaT) |
| | Compute detector position from a parent image coordinate.
|
| |
| double | AdjustedStartingSample () const |
| | Return the starting detector sample adjusted for summation.
|
| |
| double | AdjustedStartingLine () const |
| | Return the starting detector line adjusted for summation.
|
| |
| double | ParentSample () const |
| | Return parent sample.
|
| |
| double | ParentLine () const |
| | Return parent line.
|
| |
| double | DetectorSample () const |
| | Return detector sample.
|
| |
| double | DetectorLine () const |
| | Return detector line.
|
| |
| void | SetStartingDetectorSample (const double sample) |
| | Set the starting detector sample.
|
| |
| void | SetStartingDetectorLine (const double line) |
| | Set the starting detector line.
|
| |
| void | SetDetectorSampleSumming (const double summing) |
| | Set sample summing mode.
|
| |
| void | SetDetectorLineSumming (const double summing) |
| | Set line summing mode.
|
| |
| virtual double | SampleScaleFactor () const |
| | Return scaling factor for computing sample resolution.
|
| |
| virtual double | LineScaleFactor () const |
| | Return scaling factor for computing line resolution.
|
| |
| virtual double | exposureDuration (const double sample, const double line, const int band) const |
| | This virtual method is for returning the exposure duration of a given pixel.
|
| |
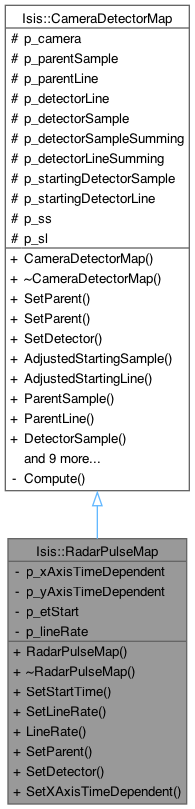
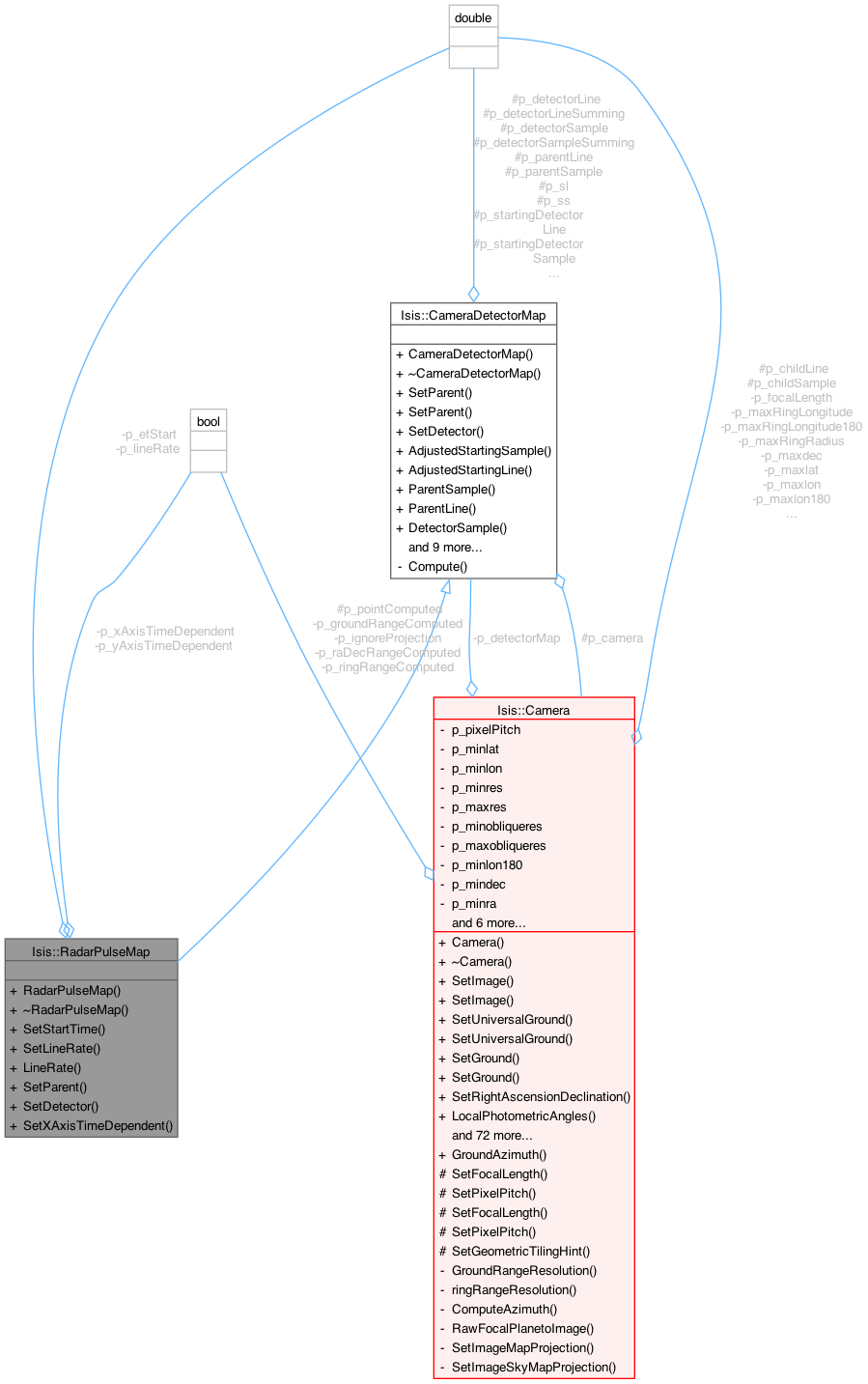
Convert between alpha image coordinates and radar sample, time coordinates.
This class is used to convert between alpha coordinates (sample/line) and radar pulse coordinates (sample,time) for a radar instrument.
- See also
- Camera
- Author
- 2008-06-16 Jeff Anderson
- History
2009-07-01 Janet Barrett - Corrected the calculations used to convert from line to time and back
2012-07-06 Debbie A. Cook, Updated Spice members to be more compliant with Isis coding standards. References #972.
Definition at line 35 of file RadarPulseMap.h.
| double Isis::CameraDetectorMap::exposureDuration |
( |
const double | sample, |
|
|
const double | line, |
|
|
const int | band ) const |
|
virtualinherited |
| bool Isis::RadarPulseMap::SetDetector |
( |
const double | sample, |
|
|
const double | line ) |
|
virtual |
| bool Isis::CameraDetectorMap::SetParent |
( |
const double | sample, |
|
|
const double | line, |
|
|
const double | deltaT ) |
|
virtualinherited |
Compute detector position from a parent image coordinate.
This method will compute the detector position from the parent line/sample coordinate and an offset from the currently set time in seconds. If the time has not already been set, the input offset is not applied.
- Parameters
-
| sample | Sample number in the parent image |
| line | Line number in the parent image |
| deltaT | option time offset from center of exposure in seconds |
- Returns
- conversion successful
Reimplemented in Isis::LineScanCameraDetectorMap, Isis::PushFrameCameraDetectorMap, Isis::RollingShutterCameraDetectorMap, and Isis::VariableLineScanCameraDetectorMap.
Definition at line 82 of file CameraDetectorMap.cpp.
References p_camera, p_detectorLine, p_detectorLineSumming, p_detectorSample, p_detectorSampleSumming, p_parentLine, p_parentSample, p_sl, and p_ss.
| bool Isis::RadarPulseMap::SetParent |
( |
const double | sample, |
|
|
const double | line ) |
|
virtual |
| void Isis::RadarPulseMap::SetStartTime |
( |
const double | etStart | ) |
|
|
inline |
Reset the starting ephemeris time.
Use this method to reset the starting time of the top edge of the first line in the alpha image. That is the time, prior to cropping, scaling, or padding. Usually this will not need to be done unless the time changes between bands.
- Parameters
-
| etStart | starting ephemeris time in seconds |
Definition at line 66 of file RadarPulseMap.h.
References p_etStart.