|
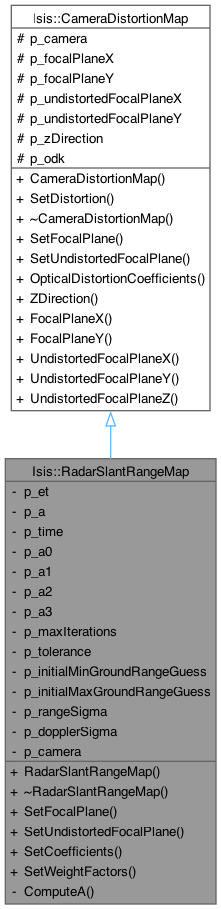
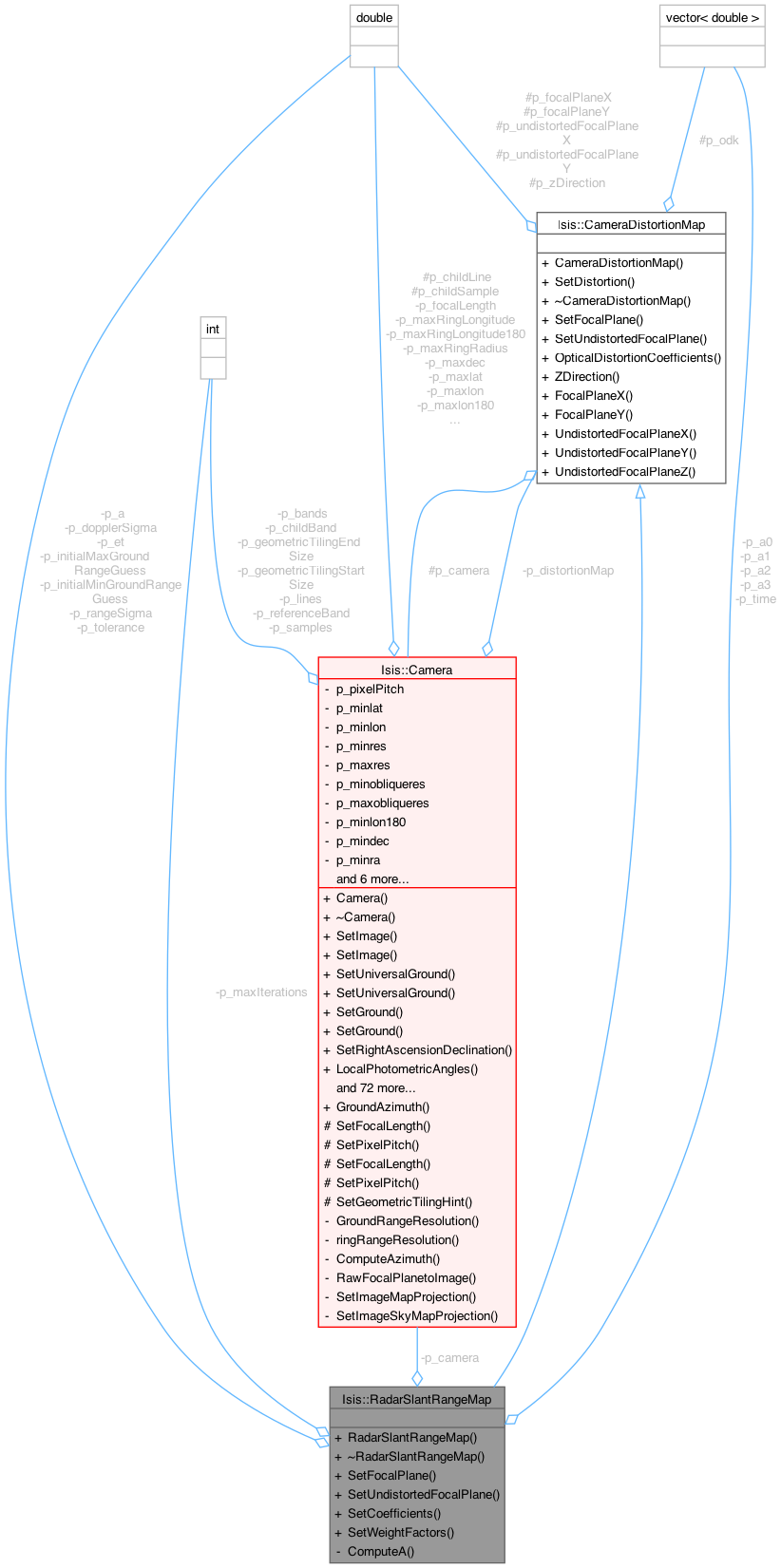
| | RadarSlantRangeMap (Camera *parent, double groundRangeResolution) |
| | Radar ground to slant range map constructor.
|
| |
| virtual | ~RadarSlantRangeMap () |
| | Destructor.
|
| |
| virtual bool | SetFocalPlane (const double dx, const double dy) |
| | Set the ground range and compute a slant range.
|
| |
| virtual bool | SetUndistortedFocalPlane (const double ux, const double uy) |
| | Set the slant range and compute a ground range.
|
| |
| void | SetCoefficients (PvlKeyword &keyword) |
| | Load the ground range/slant range coefficients from the RangeCoefficientSet keyword.
|
| |
| void | SetWeightFactors (double range_sigma, double doppler_sigma) |
| | Set the weight factors for slant range and Doppler shift.
|
| |
| virtual void | SetDistortion (int naifIkCode) |
| | Load distortion coefficients.
|
| |
| std::vector< double > | OpticalDistortionCoefficients () const |
| | Retrieve the distortion coefficients used for this model.
|
| |
| double | ZDirection () const |
| | Gets the z-direction for this camera.
|
| |
| double | FocalPlaneX () const |
| | Gets the x-value in the focal plane coordinate system.
|
| |
| double | FocalPlaneY () const |
| | Gets the y-value in the focal plane coordinate system.
|
| |
| double | UndistortedFocalPlaneX () const |
| | Gets the x-value in the undistorted focal plane coordinate system.
|
| |
| double | UndistortedFocalPlaneY () const |
| | Gets the y-value in the undistorted focal plane coordinate system.
|
| |
| double | UndistortedFocalPlaneZ () const |
| | Gets the z-value in the undistorted focal plane coordinate system.
|
| |
Convert between radar ground range and slant range.
Creates a map for converting radar ground range distance and slant range distance
- See also
- Camera
- Author
- 2008-06-16 Jeff Anderson
- History
2009-07-01 Janet Barrett - Changed the bracketing method used to solve for the root of the function that determines ground range given slant range; fixed code that determines the range coefficients to used based on current ephemeris time
2010-03-19 Debbie A. Cook - Added comments about the units and corrected slant in SetUndistortedFocalPlane to be in meters instead of km
2011-09-14 Randy Kirk - Fixed the ComputeA method so that it is handling the range coefficients properly. A linear fit is used to obtain the range coefficients if the current time falls between 2 points with known range coefficients.
2012-07-06 Debbie A. Cook, Updated Spice members to be more compliant with Isis coding standards. References #972.
2016-02-24 Randy Kirk and Janet Barrett - Fixed an issue that caused the sensor model for LRO and Chandrayaan's MiniRF to not be able to calculate and report lat/lon in the LXB mode. References #2400.
2016-08-01 Kristin Berry - Added the ability to extend the range of the initial root bracket in SetUndistortedFocalPlan if the initial range was too narrow. Also added RAs & DECs to the camera model.References #2400.
2018-09-28 Kaitlyn Lee - Removed unnecessary lines of code that were causing build warnings on MacOS 10.13. Updated code up to standards. References #5520.
Definition at line 53 of file RadarSlantRangeMap.h.
| void Isis::CameraDistortionMap::SetDistortion |
( |
int | naifIkCode | ) |
|
|
virtualinherited |
Load distortion coefficients.
This method loads the distortion coefficients from the instrument kernel. The coefficients in the NAIF instrument kernel are expected to be in the form of:
INSxxxxx_OD_K = ( coef1, coef2, ..., coefN)
where xxxxx is the instrument code (always a negative number)
These coefficient will be used to convert from focal plane x,y to undistorted x,y as follows (add equation here)
- Parameters
-
| naifIkCode | Code to search for in instrument kernel |
- Todo
Generalize to read variable number of coefficients
Add latex equation to the documentation
Reimplemented in Isis::JunoDistortionMap, Isis::KaguyaMiCameraDistortionMap, Isis::LoHighDistortionMap, Isis::LoMediumDistortionMap, Isis::LroNarrowAngleDistortionMap, Isis::OsirisRexOcamsDistortionMap, and Isis::TaylorCameraDistortionMap.
Definition at line 58 of file CameraDistortionMap.cpp.
References p_camera, p_odk, and Isis::toString().
Referenced by Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CTXCamera::CTXCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::LoHighDistortionMap::SetDistortion(), and Isis::LoMediumDistortionMap::SetDistortion().
| double Isis::CameraDistortionMap::UndistortedFocalPlaneZ |
( |
| ) |
const |
|
inherited |