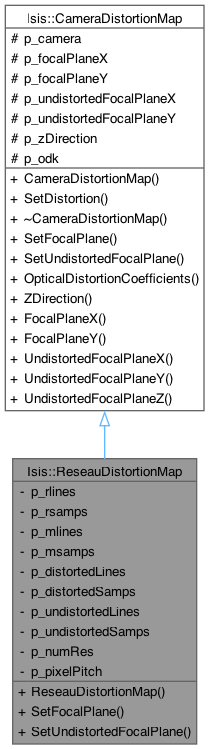
Distort/undistort focal plane coordinates.
Creates a map for adding/removing optical distortions from the focal plane of the camera.
- Author
- 2005-06-08 Elizabeth Ribelin
- History
- 2005-12-07 Elizabeth Miller - Added check for colinearity in closest reseaus to fix a bug
Definition at line 27 of file ReseauDistortionMap.h.
| void Isis::CameraDistortionMap::SetDistortion |
( |
int | naifIkCode | ) |
|
|
virtualinherited |
Load distortion coefficients.
This method loads the distortion coefficients from the instrument kernel. The coefficients in the NAIF instrument kernel are expected to be in the form of:
INSxxxxx_OD_K = ( coef1, coef2, ..., coefN)
where xxxxx is the instrument code (always a negative number)
These coefficient will be used to convert from focal plane x,y to undistorted x,y as follows (add equation here)
- Parameters
-
| naifIkCode | Code to search for in instrument kernel |
- Todo
Generalize to read variable number of coefficients
Add latex equation to the documentation
Reimplemented in Isis::JunoDistortionMap, Isis::KaguyaMiCameraDistortionMap, Isis::LoHighDistortionMap, Isis::LoMediumDistortionMap, Isis::LroNarrowAngleDistortionMap, Isis::OsirisRexOcamsDistortionMap, and Isis::TaylorCameraDistortionMap.
Definition at line 58 of file CameraDistortionMap.cpp.
References p_camera, p_odk, and Isis::toString().
Referenced by Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CTXCamera::CTXCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::LoHighDistortionMap::SetDistortion(), and Isis::LoMediumDistortionMap::SetDistortion().
| double Isis::CameraDistortionMap::UndistortedFocalPlaneZ |
( |
| ) |
const |
|
inherited |