 |
Isis 3 Developer Reference
|
|
Isis 3 Developer Reference
|
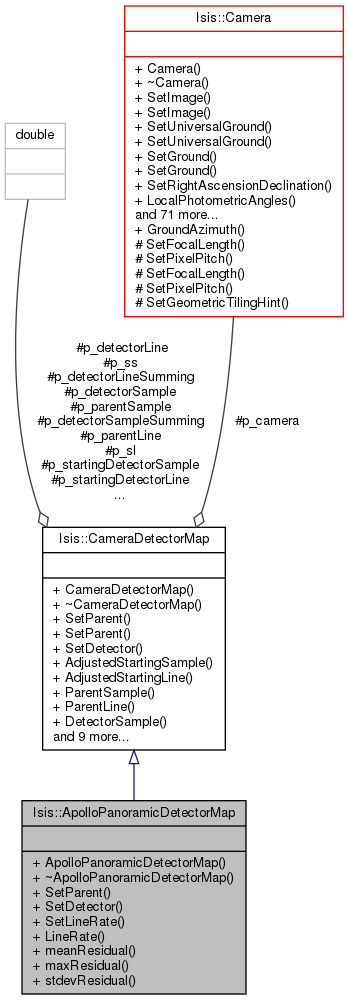
Convert between parent image (aka encoder aka machine) coordinates and detector coordinates
More...
#include <ApolloPanoramicDetectorMap.h>

Public Member Functions | |
| ApolloPanoramicDetectorMap (Camera *parent, double etMiddle, double lineRate, Pvl *lab) | |
| Construct a detector map for line scan cameras. More... | |
| virtual | ~ApolloPanoramicDetectorMap () |
| Destroys ApolloPanoramicDetectorMap object. More... | |
| virtual bool | SetParent (const double sample, const double line) |
| This method sets dector sample line coordinates from given cube coordinates. More... | |
| virtual bool | SetDetector (const double sample, const double line) |
| This method sets cube sample line coordinates from given Dector coordinates. More... | |
| void | SetLineRate (const double lineRate) |
| Reset the line rate. More... | |
| double | LineRate () const |
| Return the time in seconds between scan lines. More... | |
| double | meanResidual () |
| Mean (average) of interior orientation residual vector lengths, accesor. More... | |
| double | maxResidual () |
| Max interior orientation residual vector length, accesor. More... | |
| double | stdevResidual () |
| Standard deviation of interior orientation residual vector lengths, accesor. More... | |
| virtual bool | SetParent (const double sample, const double line, const double deltaT) |
| Compute detector position from a parent image coordinate. More... | |
| double | AdjustedStartingSample () const |
| Return the starting detector sample adjusted for summation. More... | |
| double | AdjustedStartingLine () const |
| Return the starting detector line adjusted for summation. More... | |
| double | ParentSample () const |
| Return parent sample. More... | |
| double | ParentLine () const |
| Return parent line. More... | |
| double | DetectorSample () const |
| Return detector sample. More... | |
| double | DetectorLine () const |
| Return detector line. More... | |
| void | SetStartingDetectorSample (const double sample) |
| Set the starting detector sample. More... | |
| void | SetStartingDetectorLine (const double line) |
| Set the starting detector line. More... | |
| void | SetDetectorSampleSumming (const double summing) |
| Set sample summing mode. More... | |
| void | SetDetectorLineSumming (const double summing) |
| Set line summing mode. More... | |
| virtual double | SampleScaleFactor () const |
| Return scaling factor for computing sample resolution. More... | |
| virtual double | LineScaleFactor () const |
| Return scaling factor for computing line resolution. More... | |
| virtual double | exposureDuration (const double sample, const double line, const int band) const |
| This virtual method is for returning the exposure duration of a given pixel. More... | |
Protected Attributes | |
| Camera * | p_camera |
| Pointer to the camera. More... | |
| double | p_parentSample |
| The parent sample calculated from the detector. More... | |
| double | p_parentLine |
| The parent line calculated from the detector. More... | |
| double | p_detectorLine |
| Detector coordinate line value. More... | |
| double | p_detectorSample |
| Detector coordinate sample value. More... | |
| double | p_detectorSampleSumming |
| The scaling factor for computing sample resolution. More... | |
| double | p_detectorLineSumming |
| The scaling factor for computing line resolution. More... | |
| double | p_startingDetectorSample |
| Detector start coordinate sample value. More... | |
| double | p_startingDetectorLine |
| Detector start coordinate line value. More... | |
| double | p_ss |
| Start sample. More... | |
| double | p_sl |
| Start line. More... | |
Convert between parent image (aka encoder aka machine) coordinates and detector coordinates
This class is used to convert between parent image (aka encoder aka machine) coordinates (sample/line) and detector coordinates for a the Apollo Panoramic Image.
|
inline |
Construct a detector map for line scan cameras.
| parent | The parent Camera Model |
| etMiddle | Time of the center line, line 0 after interior orientation |
| lineRate | the time in seconds between lines (msec) |
| lab | The labels to use for the camera creation |
|
inlinevirtual |
Destroys ApolloPanoramicDetectorMap object.
|
inherited |
Return the starting detector line adjusted for summation.
References Isis::CameraDetectorMap::p_sl.
|
inherited |
Return the starting detector sample adjusted for summation.
References Isis::CameraDetectorMap::p_ss.
|
inherited |
Return detector line.
References Isis::CameraDetectorMap::p_detectorLine.
Referenced by Isis::Camera::SetImage().
|
inherited |
Return detector sample.
References Isis::CameraDetectorMap::p_detectorSample.
Referenced by Isis::Camera::SetImage().
|
virtualinherited |
This virtual method is for returning the exposure duration of a given pixel.
For framing cameras, exposure duration is not available so it throws an error.
| sample | The sample of the desired pixel. |
| line | The line of the desired pixel. |
| band | The band of the desired pixel. |
| IException::Programmer | "Exposure duration is only available for LineScan, VariableLineScan, and PushFrame Cameras." |
Reimplemented in Isis::PushFrameCameraDetectorMap, Isis::VariableLineScanCameraDetectorMap, Isis::LineScanCameraDetectorMap, and Isis::NirsDetectorMap.
References _FILEINFO_, and Isis::IException::Programmer.
Referenced by Isis::Camera::exposureDuration().
|
inlinevirtual |
Return the time in seconds between scan lines.
Reimplemented from Isis::CameraDetectorMap.
|
virtualinherited |
Return scaling factor for computing line resolution.
References Isis::CameraDetectorMap::p_detectorLineSumming.
Referenced by Isis::Camera::LineResolution(), Isis::Camera::ObliqueLineResolution(), Isis::ThemisIrCamera::SetBand(), Isis::PushFrameCameraDetectorMap::SetDetector(), Isis::PushFrameCameraDetectorMap::SetParent(), and Isis::PushFrameCameraDetectorMap::TotalFramelets().
|
inline |
Max interior orientation residual vector length, accesor.
References Isis::ApolloPanIO::maxResiduals().
Referenced by Isis::ApolloPanoramicCamera::ApolloPanoramicCamera().
|
inline |
Mean (average) of interior orientation residual vector lengths, accesor.
References Isis::ApolloPanIO::meanResiduals().
Referenced by Isis::ApolloPanoramicCamera::ApolloPanoramicCamera().
|
inherited |
Return parent line.
References Isis::CameraDetectorMap::p_parentLine.
Referenced by Isis::Camera::SetRightAscensionDeclination().
|
inherited |
Return parent sample.
References Isis::CameraDetectorMap::p_parentSample.
Referenced by Isis::Camera::SetRightAscensionDeclination().
|
virtualinherited |
Return scaling factor for computing sample resolution.
References Isis::CameraDetectorMap::p_detectorSampleSumming.
Referenced by Isis::Camera::ObliqueSampleResolution(), and Isis::Camera::SampleResolution().
|
virtual |
This method sets cube sample line coordinates from given Dector coordinates.
| sample | dector sample coordinate |
| line | detector line coordinate |
Reimplemented from Isis::CameraDetectorMap.
|
inlineinherited |
Set line summing mode.
Use this method to specify if detector lines are summed/averaged. That is, one image lines represents the average of N detectors. If not set the default is 1.
| summing | Line summing mode |
References Isis::CameraDetectorMap::p_detectorLineSumming.
Referenced by Isis::CrismCamera::CrismCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::MarciCamera::MarciCamera(), Isis::MdisCamera::MdisCamera(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), and Isis::ThemisVisCamera::ThemisVisCamera().
|
inlineinherited |
Set sample summing mode.
Use this method to specify if detector samples are summed/averaged. That is, one image sample represents the average of N detectors. If not set the default is 1.
| summing | Sample summing mode |
References Isis::CameraDetectorMap::p_detectorSampleSumming.
Referenced by Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::MarciCamera::MarciCamera(), Isis::MdisCamera::MdisCamera(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), and Isis::ThemisVisCamera::ThemisVisCamera().
|
inline |
Reset the line rate.
Use this method to reset the time between lines. Usually this will not need to be done unless the rate changes between bands.
| lineRate | the time in seconds between lines |
|
virtual |
This method sets dector sample line coordinates from given cube coordinates.
| sample | cube sample coordinate |
| line | cube line coordinate |
Reimplemented from Isis::CameraDetectorMap.
|
virtualinherited |
Compute detector position from a parent image coordinate.
This method will compute the detector position from the parent line/sample coordinate and an offset from the currently set time in seconds. If the time has not already been set, the input offset is not applied.
| sample | Sample number in the parent image |
| line | Line number in the parent image |
| deltaT | option time offset from center of exposure in seconds |
Reimplemented in Isis::VariableLineScanCameraDetectorMap, Isis::LineScanCameraDetectorMap, and Isis::PushFrameCameraDetectorMap.
References Isis::iTime::Et(), Isis::Spice::isTimeSet(), Isis::CameraDetectorMap::p_camera, Isis::CameraDetectorMap::p_detectorLine, Isis::CameraDetectorMap::p_detectorLineSumming, Isis::CameraDetectorMap::p_detectorSample, Isis::CameraDetectorMap::p_detectorSampleSumming, Isis::CameraDetectorMap::p_parentLine, Isis::CameraDetectorMap::p_parentSample, Isis::CameraDetectorMap::p_sl, Isis::CameraDetectorMap::p_ss, Isis::Sensor::setTime(), and Isis::Spice::time().
|
inlineinherited |
Set the starting detector line.
Use this method to specify the starting detector that represents the first image line in the cube. If not set the default is 1.
| line | Starting detector line |
References Isis::CameraDetectorMap::p_startingDetectorLine.
Referenced by Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::JunoCamera::JunoCamera(), Isis::MdisCamera::MdisCamera(), and Isis::RosettaOsirisCamera::RosettaOsirisCamera().
|
inlineinherited |
Set the starting detector sample.
Use this method to specify the starting detector that represents the first image sample in the cube. If not set the default is 1.
| sample | Starting detector sample |
References Isis::CameraDetectorMap::p_startingDetectorSample.
Referenced by Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::CTXCamera::CTXCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::MdisCamera::MdisCamera(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), and Isis::RosettaOsirisCamera::RosettaOsirisCamera().
|
inline |
Standard deviation of interior orientation residual vector lengths, accesor.
References Isis::ApolloPanIO::stdevResiduals().
Referenced by Isis::ApolloPanoramicCamera::ApolloPanoramicCamera().
|
protectedinherited |
Pointer to the camera.
Referenced by Isis::CameraDetectorMap::CameraDetectorMap(), Isis::LineScanCameraDetectorMap::SetDetector(), Isis::VariableLineScanCameraDetectorMap::SetDetector(), Isis::RadarPulseMap::SetDetector(), Isis::PushFrameCameraDetectorMap::SetFramelet(), Isis::CameraDetectorMap::SetParent(), Isis::LineScanCameraDetectorMap::SetParent(), Isis::VariableLineScanCameraDetectorMap::SetParent(), Isis::RadarPulseMap::SetParent(), and Isis::PushFrameCameraDetectorMap::TotalFramelets().
|
protectedinherited |
Detector coordinate line value.
Referenced by Isis::CameraDetectorMap::DetectorLine(), Isis::CameraDetectorMap::SetDetector(), Isis::PushFrameCameraDetectorMap::SetDetector(), Isis::CameraDetectorMap::SetParent(), Isis::LineScanCameraDetectorMap::SetParent(), Isis::PushFrameCameraDetectorMap::SetParent(), Isis::VariableLineScanCameraDetectorMap::SetParent(), and Isis::RadarPulseMap::SetParent().
|
protectedinherited |
The scaling factor for computing line resolution.
Referenced by Isis::CameraDetectorMap::CameraDetectorMap(), Isis::CameraDetectorMap::LineScaleFactor(), Isis::CameraDetectorMap::SetDetector(), Isis::CameraDetectorMap::SetDetectorLineSumming(), and Isis::CameraDetectorMap::SetParent().
|
protectedinherited |
Detector coordinate sample value.
Referenced by Isis::CameraDetectorMap::DetectorSample(), Isis::CameraDetectorMap::SetDetector(), Isis::PushFrameCameraDetectorMap::SetDetector(), and Isis::CameraDetectorMap::SetParent().
|
protectedinherited |
The scaling factor for computing sample resolution.
Referenced by Isis::CameraDetectorMap::CameraDetectorMap(), Isis::CameraDetectorMap::SampleScaleFactor(), Isis::CameraDetectorMap::SetDetector(), Isis::CameraDetectorMap::SetDetectorSampleSumming(), and Isis::CameraDetectorMap::SetParent().
|
protectedinherited |
The parent line calculated from the detector.
Referenced by Isis::CameraDetectorMap::ParentLine(), Isis::CameraDetectorMap::SetDetector(), Isis::LineScanCameraDetectorMap::SetDetector(), Isis::PushFrameCameraDetectorMap::SetDetector(), Isis::VariableLineScanCameraDetectorMap::SetDetector(), Isis::RadarPulseMap::SetDetector(), Isis::CameraDetectorMap::SetParent(), and Isis::PushFrameCameraDetectorMap::SetParent().
|
protectedinherited |
The parent sample calculated from the detector.
Referenced by Isis::CameraDetectorMap::ParentSample(), Isis::CameraDetectorMap::SetDetector(), Isis::CameraDetectorMap::SetParent(), and Isis::PushFrameCameraDetectorMap::SetParent().
|
protectedinherited |
Start line.
Referenced by Isis::CameraDetectorMap::AdjustedStartingLine(), Isis::CameraDetectorMap::SetDetector(), and Isis::CameraDetectorMap::SetParent().
|
protectedinherited |
Start sample.
Referenced by Isis::CameraDetectorMap::AdjustedStartingSample(), Isis::CameraDetectorMap::SetDetector(), and Isis::CameraDetectorMap::SetParent().
|
protectedinherited |
Detector start coordinate line value.
Referenced by Isis::CameraDetectorMap::CameraDetectorMap(), and Isis::CameraDetectorMap::SetStartingDetectorLine().
|
protectedinherited |
Detector start coordinate sample value.
Referenced by Isis::CameraDetectorMap::CameraDetectorMap(), and Isis::CameraDetectorMap::SetStartingDetectorSample().