 |
Isis 3 Programmer Reference
|
|
Isis 3 Programmer Reference
|
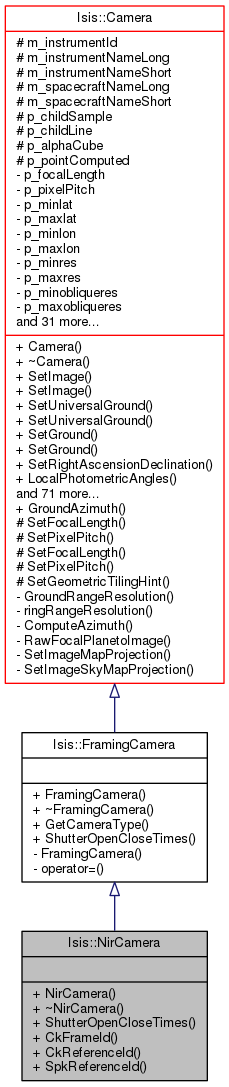
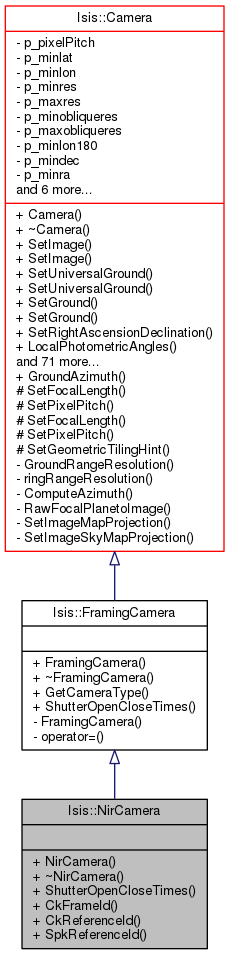
This is the camera model for the Clementine Near Infrared Camera. More...
#include <NirCamera.h>
Public Types | |
| enum | CameraType { Framing, PushFrame, LineScan, Radar, Point, RollingShutter, Csm } |
| This enum defines the types of cameras supported in this class. More... | |
Public Member Functions | |
| NirCamera (Cube &cube) | |
| Constructs a Clementine HiresCamera object using the image labels. More... | |
| ~NirCamera () | |
| Destroys the NirCamera object. More... | |
| virtual std::pair< iTime, iTime > | ShutterOpenCloseTimes (double time, double exposureDuration) |
| Returns the shutter open and close times. More... | |
| virtual int | CkFrameId () const |
| CK frame ID - - Instrument Code from spacit run on CK. More... | |
| virtual int | CkReferenceId () const |
| CK Reference ID - J2000. More... | |
| virtual int | SpkReferenceId () const |
| SPK Reference ID - J2000. More... | |
| virtual CameraType | GetCameraType () const |
| This method returns Framing camera type. More... | |
| virtual bool | SetImage (const double sample, const double line) |
| Sets the sample/line values of the image to get the lat/lon values. More... | |
| virtual bool | SetImage (const double sample, const double line, const double deltaT) |
| Sets the sample/line values of the image to get the lat/lon values with a time offset of deltaT. More... | |
| virtual bool | SetUniversalGround (const double latitude, const double longitude) |
| Sets the lat/lon values to get the sample/line values. More... | |
| virtual bool | SetUniversalGround (const double latitude, const double longitude, const double radius) |
| Sets the lat/lon/radius values to get the sample/line values. More... | |
| bool | SetUniversalGround (const double latitude, const double longitude, bool backCheck=true) |
| This is the opposite routine for SetLookDirection. More... | |
| bool | SetUniversalGround (const double latitude, const double longitude, const double radius, bool backCheck=true) |
| This overloaded method has the opposite function as SetLookDirection. More... | |
| virtual bool | SetGround (Latitude latitude, Longitude longitude) |
| Sets the lat/lon values to get the sample/line values. More... | |
| virtual bool | SetGround (const SurfacePoint &surfacePt) |
| Sets the lat/lon/radius values to get the sample/line values. More... | |
| bool | SetGround (const SurfacePoint &surfacePt, bool backCheck=true) |
| This overloaded method has the opposite function as SetLookDirection. More... | |
| bool | SetRightAscensionDeclination (const double ra, const double dec) |
| Sets the right ascension declination. More... | |
| void | LocalPhotometricAngles (Angle &phase, Angle &incidence, Angle &emission, bool &success) |
| Calculates LOCAL photometric angles using the DEM (not ellipsoid). More... | |
| void | GetLocalNormal (double normal[3]) |
| This method will find the local normal at the current (sample, line) and set it to the passed in array. More... | |
| bool | HasProjection () |
| Checks to see if the camera object has a projection. More... | |
| virtual bool | IsBandIndependent () |
| Virtual method that checks if the band is independent. More... | |
| int | ReferenceBand () const |
| Returns the reference band. More... | |
| bool | HasReferenceBand () const |
| Checks to see if the Camera object has a reference band. More... | |
| virtual void | SetBand (const int band) |
| Virtual method that sets the band number. More... | |
| virtual double | Sample () const |
| Returns the current sample number. More... | |
| int | Band () const |
| Returns the current band. More... | |
| virtual double | Line () const |
| Returns the current line number. More... | |
| bool | GroundRange (double &minlat, double &maxlat, double &minlon, double &maxlon, Pvl &pvl) |
| Computes the Ground Range. More... | |
| bool | ringRange (double &minRingRadius, double &maxRingRadius, double &minRingLongitude, double &maxRingLongitude, Pvl &pvl) |
| Analogous to the above Ground Range method. More... | |
| bool | IntersectsLongitudeDomain (Pvl &pvl) |
| Checks whether the ground range intersects the longitude domain or not. More... | |
| virtual double | PixelResolution () |
| Returns the pixel resolution at the current position in meters/pixel. More... | |
| virtual double | LineResolution () |
| Returns the line resolution at the current position in meters. More... | |
| virtual double | SampleResolution () |
| Returns the sample resolution at the current position in meters. More... | |
| virtual double | DetectorResolution () |
| Returns the detector resolution at the current position in meters. More... | |
| virtual double | ObliqueDetectorResolution () |
| This method returns the Oblique Detector Resolution if the Look Vector intersects the target and if the emission angle is greater than or equal to 0, and less than 90 degrees. More... | |
| virtual double | ObliqueSampleResolution () |
| Returns the oblique sample resolution at the current position in m. More... | |
| virtual double | ObliqueLineResolution () |
| Returns the oblique line resolution at the current position in meters. More... | |
| virtual double | ObliquePixelResolution () |
| Returns the oblique pixel resolution at the current position in meters/pixel. More... | |
| virtual double | resolution () |
| Returns the resolution of the camera. More... | |
| double | LowestImageResolution () |
| Returns the lowest/worst resolution in the entire image. More... | |
| double | HighestImageResolution () |
| Returns the highest/best resolution in the entire image. More... | |
| double | LowestObliqueImageResolution () |
| Returns the lowest/worst oblique resolution in the entire image. More... | |
| double | HighestObliqueImageResolution () |
| Returns the highest/best oblique resolution in the entire image. More... | |
| void | BasicMapping (Pvl &map) |
| Writes the basic mapping group to the specified Pvl. More... | |
| void | basicRingMapping (Pvl &map) |
| Writes the basic mapping group for ring plane to the specified Pvl. More... | |
| double | FocalLength () const |
| Returns the focal length. More... | |
| double | PixelPitch () const |
| Returns the pixel pitch. More... | |
| virtual double | exposureDuration () const |
| Return the exposure duration for the pixel that the camera is set to. More... | |
| virtual double | exposureDuration (const double sample, const double line, const int band=-1) const |
| Return the exposure duration for the pixel at the given line, sample and band. More... | |
| virtual QList< QPointF > | PixelIfovOffsets () |
| Returns the pixel ifov offsets from center of pixel, which defaults to the (pixel pitch * summing mode ) / 2. More... | |
| int | Samples () const |
| Returns the number of samples in the image. More... | |
| int | Lines () const |
| Returns the number of lines in the image. More... | |
| int | Bands () const |
| Returns the number of bands in the image. More... | |
| int | ParentLines () const |
| Returns the number of lines in the parent alphacube. More... | |
| int | ParentSamples () const |
| Returns the number of samples in the parent alphacube. More... | |
| double | CelestialNorthClockAngle () |
| Computes the celestial north clock angle at the current line/sample or ra/dec. More... | |
| bool | RaDecRange (double &minra, double &maxra, double &mindec, double &maxdec) |
| Computes the RaDec range. More... | |
| double | RaDecResolution () |
| Returns the RaDec resolution. More... | |
| CameraDistortionMap * | DistortionMap () |
| Returns a pointer to the CameraDistortionMap object. More... | |
| CameraFocalPlaneMap * | FocalPlaneMap () |
| Returns a pointer to the CameraFocalPlaneMap object. More... | |
| CameraDetectorMap * | DetectorMap () |
| Returns a pointer to the CameraDetectorMap object. More... | |
| CameraGroundMap * | GroundMap () |
| Returns a pointer to the CameraGroundMap object. More... | |
| CameraSkyMap * | SkyMap () |
| Returns a pointer to the CameraSkyMap object. More... | |
| QString | instrumentId () |
| This method returns the InstrumentId as it appears in the cube. More... | |
| QString | instrumentNameLong () const |
| This method returns the full instrument name. More... | |
| QString | instrumentNameShort () const |
| This method returns the shortened instrument name. More... | |
| QString | spacecraftNameLong () const |
| This method returns the full spacecraft name. More... | |
| QString | spacecraftNameShort () const |
| This method returns the shortened spacecraft name. More... | |
| void | SetDistortionMap (CameraDistortionMap *map, bool deleteExisting=true) |
| Sets the Distortion Map. More... | |
| void | SetFocalPlaneMap (CameraFocalPlaneMap *map) |
| Sets the Focal Plane Map. More... | |
| void | SetDetectorMap (CameraDetectorMap *map) |
| Sets the Detector Map. More... | |
| void | SetGroundMap (CameraGroundMap *map) |
| Sets the Ground Map. More... | |
| void | SetSkyMap (CameraSkyMap *map) |
| Sets the Sky Map. More... | |
| double | NorthAzimuth () |
| Returns the North Azimuth. More... | |
| double | SunAzimuth () |
| Returns the Sun Azimuth. More... | |
| double | SpacecraftAzimuth () |
| Return the Spacecraft Azimuth. More... | |
| double | OffNadirAngle () |
| Return the off nadir angle in degrees. More... | |
| void | IgnoreProjection (bool ignore) |
| Set whether or not the camera should ignore the Projection. More... | |
| void | LoadCache () |
| This loads the spice cache big enough for this image. More... | |
| std::pair< double, double > | StartEndEphemerisTimes () |
| Calculates the start and end ephemeris times. More... | |
| int | CacheSize (double startTime, double endTime) |
| This method calculates the spice cache size. More... | |
| void | GetGeometricTilingHint (int &startSize, int &endSize) |
| This will get the geometric tiling hint; these values are typically used for ProcessRubberSheet::SetTiling(...). More... | |
| bool | InCube () |
| This returns true if the current Sample() or Line() value is outside of the cube (meaning the point must have been extrapolated). More... | |
| virtual int | SpkTargetId () const |
| Provides target code for instruments SPK NAIF kernel. More... | |
| virtual int | SpkCenterId () const |
| Provides the center of motion body for SPK NAIF kernel. More... | |
| void | setTime (const iTime &time) |
| By setting the time you essential set the position of the spacecraft and body as indicated in the class Spice. More... | |
| bool | SetLookDirection (const double v[3]) |
| Sets the look direction of the spacecraft. More... | |
| bool | HasSurfaceIntersection () const |
| Returns if the last call to either SetLookDirection or SetUniversalGround had a valid intersection with the target. More... | |
| void | Coordinate (double p[3]) const |
| Returns the x,y,z of the surface intersection in BodyFixed km. More... | |
| virtual double | UniversalLatitude () const |
| Returns the planetocentric latitude, in degrees, at the surface intersection point in the body fixed coordinate system. More... | |
| Latitude | GetLatitude () const |
| Returns a planetocentric latitude object at the surface intersection point in body fixed. More... | |
| virtual double | UniversalLongitude () const |
| Returns the positive east, 0-360 domain longitude, in degrees, at the surface intersection point in the body fixed coordinate system. More... | |
| Longitude | GetLongitude () const |
| Returns a positive east, 0-360 domain longitude object at the surface intersection point in the body fixed coordinate system. More... | |
| SurfacePoint | GetSurfacePoint () const |
| Returns the surface point (most efficient accessor). More... | |
| Distance | LocalRadius () const |
| Returns the local radius at the intersection point. More... | |
| Distance | LocalRadius (Latitude lat, Longitude lon) |
| Returns the local radius at the intersection point. More... | |
| Distance | LocalRadius (double lat, double lon) |
| Returns the local radius at the intersection point. More... | |
| virtual double | PhaseAngle () const |
| Returns the phase angle in degrees. More... | |
| virtual double | EmissionAngle () const |
| Returns the emission angle in degrees. More... | |
| virtual double | IncidenceAngle () const |
| Returns the incidence angle in degrees. More... | |
| void | LookDirection (double v[3]) const |
| Returns the look direction in the camera coordinate system. More... | |
| std::vector< double > | lookDirectionJ2000 () const |
| Returns the look direction in the camera coordinate system. More... | |
| std::vector< double > | lookDirectionBodyFixed () const |
| Returns the look direction in the body fixed coordinate system. More... | |
| virtual double | RightAscension () |
| Returns the right ascension angle (sky longitude). More... | |
| virtual double | Declination () |
| Returns the declination angle (sky latitude). More... | |
| void | SpacecraftSurfaceVector (double scSurfaceVector[3]) const |
| Sets the vector between the spacecraft and surface point in body-fixed. More... | |
| virtual double | SlantDistance () const |
| Return the distance between the spacecraft and surface point in kmv. More... | |
| double | LocalSolarTime () |
| Return the local solar time in hours. More... | |
| virtual double | SolarDistance () const |
| Returns the distance between the sun and surface point in AU. More... | |
| double | SpacecraftAltitude () |
| Returns the distance from the spacecraft to the subspacecraft point in km. More... | |
| void | IgnoreElevationModel (bool ignore) |
| This allows you to ignore the cube elevation model and use the ellipse. More... | |
| void | instrumentPosition (double p[3]) const |
| Returns the spacecraft position in body-fixed frame km units. More... | |
| virtual SpicePosition * | instrumentPosition () const |
| Accessor method for the instrument position. More... | |
| virtual void | instrumentBodyFixedPosition (double p[3]) const |
| Returns the spacecraft position in body-fixed frame km units. More... | |
| virtual void | sunPosition (double p[3]) const |
| Fills the input vector with sun position information, in either body-fixed or J2000 reference frame and km units. More... | |
| virtual SpicePosition * | sunPosition () const |
| Accessor method for the sun position. More... | |
| virtual double | targetCenterDistance () const |
| Calculates and returns the distance from the spacecraft to the target center. More... | |
| virtual double | sunToBodyDist () const |
| virtual Longitude | solarLongitude () |
| Returns the solar longitude. More... | |
| virtual void | instrumentBodyFixedVelocity (double v[3]) const |
| Returns the spacecraft velocity in body-fixed frame km/sec units. More... | |
| iTime | time () const |
| Returns the ephemeris time in seconds which was used to obtain the spacecraft and sun positions. More... | |
| void | radii (Distance r[3]) const |
| Returns the radii of the body in km. More... | |
| virtual void | createCache (iTime startTime, iTime endTime, const int size, double tol) |
| This method creates an internal cache of spacecraft and sun positions over a specified time range. More... | |
| virtual iTime | cacheStartTime () const |
| Accessor method for the cache start time. More... | |
| virtual iTime | cacheEndTime () const |
| Accessor method for the cache end time. More... | |
| virtual void | subSpacecraftPoint (double &lat, double &lon) |
| Returns the sub-spacecraft latitude/longitude in universal coordinates (0-360 positive east, ocentric) More... | |
| virtual void | subSolarPoint (double &lat, double &lon) |
| Returns the sub-solar latitude/longitude in universal coordinates (0-360 positive east, ocentric) More... | |
| virtual Target * | target () const |
| Returns a pointer to the target object. More... | |
| QString | targetName () const |
| Returns the QString name of the target. More... | |
| virtual iTime | getClockTime (QString clockValue, int sclkCode=-1, bool clockTicks=false) |
| This converts the spacecraft clock ticks value (clockValue) to an iTime. More... | |
| SpiceDouble | getDouble (const QString &key, int index=0) |
| This returns a value from the NAIF text pool. More... | |
| SpiceInt | getInteger (const QString &key, int index=0) |
| This returns a value from the NAIF text pool. More... | |
| QString | getString (const QString &key, int index=0) |
| This returns a value from the NAIF text pool. More... | |
| virtual SpiceRotation * | bodyRotation () const |
| Accessor method for the body rotation. More... | |
| virtual SpiceRotation * | instrumentRotation () const |
| Accessor method for the instrument rotation. More... | |
| bool | isUsingAle () |
| bool | hasKernels (Pvl &lab) |
| Returns true if the kernel group has kernel files. More... | |
| bool | isTimeSet () |
| Returns true if time has been initialized. More... | |
| SpiceInt | naifBodyCode () const |
| This returns the NAIF body code of the target indicated in the labels. More... | |
| SpiceInt | naifSpkCode () const |
| This returns the NAIF SPK code to use when reading from SPK kernels. More... | |
| SpiceInt | naifCkCode () const |
| This returns the NAIF CK code to use when reading from CK kernels. More... | |
| SpiceInt | naifIkCode () const |
| This returns the NAIF IK code to use when reading from instrument kernels. More... | |
| SpiceInt | naifSclkCode () const |
| This returns the NAIF SCLK code to use when reading from instrument kernels. More... | |
| SpiceInt | naifBodyFrameCode () const |
| This returns the NAIF body frame code. More... | |
| PvlObject | getStoredNaifKeywords () const |
| This returns the PvlObject that stores all of the requested Naif data and can be a replacement for furnishing text kernels. More... | |
Static Public Member Functions | |
| static double | GroundAzimuth (double glat, double glon, double slat, double slon) |
| Computes and returns the ground azimuth between the ground point and another point of interest, such as the subspacecraft point or the subsolar point. More... | |
Protected Types | |
| enum | SpiceValueType { SpiceDoubleType, SpiceStringType, SpiceIntType, SpiceByteCodeType } |
| NAIF value primitive type. More... | |
Protected Member Functions | |
| void | SetFocalLength (double v) |
| Sets the focal length. More... | |
| void | SetFocalLength () |
| Reads the focal length from the instrument kernel. More... | |
| void | SetPixelPitch (double v) |
| Sets the pixel pitch. More... | |
| void | SetPixelPitch () |
| Reads the Pixel Pitch from the instrument kernel. More... | |
| void | SetGeometricTilingHint (int startSize=128, int endSize=8) |
| This method sets the best geometric tiling size for projecting from this camera model. More... | |
| QVariant | readValue (QString key, SpiceValueType type, int index=0) |
| This should be used for reading ALL text naif kernel values. More... | |
| void | storeResult (QString name, SpiceValueType type, QVariant value) |
| QVariant | getStoredResult (QString name, SpiceValueType type) |
| void | storeValue (QString key, int index, SpiceValueType type, QVariant value) |
| QVariant | readStoredValue (QString key, SpiceValueType type, int index) |
| virtual void | computeSolarLongitude (iTime et) |
| Computes the solar longitude for the given ephemeris time. More... | |
Protected Attributes | |
| QString | m_instrumentId |
| The InstrumentId as it appears on the cube. More... | |
| QString | m_instrumentNameLong |
| Full instrument name. More... | |
| QString | m_instrumentNameShort |
| Shortened instrument name. More... | |
| QString | m_spacecraftNameLong |
| Full spacecraft name. More... | |
| QString | m_spacecraftNameShort |
| Shortened spacecraft name. More... | |
| double | p_childSample |
| Sample value for child. More... | |
| double | p_childLine |
| Line value for child. More... | |
| AlphaCube * | p_alphaCube |
| A pointer to the AlphaCube. More... | |
| bool | p_pointComputed |
| Flag showing if Sample/Line has been computed. More... | |
| SpiceDouble | m_lookB [3] |
| Look direction in body fixed. More... | |
| bool | m_newLookB |
| flag to indicate we need to recompute ra/dec More... | |
| SpiceDouble | m_uB [3] |
| This contains the sun position (u) in the bodyfixed reference frame (B). More... | |
| SpiceDouble | m_BJ [3][3] |
| This contains the transformation matrix from J2000 (J) to Body fixed (B). More... | |
| Target * | m_target |
| Target of the observation. More... | |
| iTime * | m_et |
| Ephemeris time (read NAIF documentation for a detailed description) More... | |
| Longitude * | m_solarLongitude |
| Body rotation solar longitude value. More... | |
Private Member Functions | |
| void | GroundRangeResolution () |
| Computes the ground range and min/max resolution. More... | |
| void | ringRangeResolution () |
| Analogous to above GroundRangeResolution method. More... | |
| double | ComputeAzimuth (const double lat, const double lon) |
| Computes the image azimuth value from your current position (origin) to a point of interest specified by the lat/lon input to this method. More... | |
| bool | RawFocalPlanetoImage () |
| Computes the image coordinate for the current universal ground point. More... | |
| bool | SetImageMapProjection (const double sample, const double line, ShapeModel *shape) |
| Sets the sample/line values of the image to get the lat/lon values for a Map Projected image. More... | |
| bool | SetImageSkyMapProjection (const double sample, const double line, ShapeModel *shape) |
| Sets the sample/line values of the image to get the lat/lon values for a Skymap Projected image. More... | |
| void | CommonInitialize (const std::string &demCube) |
| void | computeRaDec () |
| Computes the ra/dec from the look direction. More... | |
| bool | SetGroundLocal (bool backCheck) |
| Computes look vector. More... | |
| void | init (Pvl &pvl, bool noTables, nlohmann::json isd=NULL) |
| Initialization of Spice object. More... | |
| void | csmInit (Cube &cube, Pvl label) |
| Initialize the Spice object for a CSMCamera. More... | |
| void | defaultInit () |
| Default initialize the members of the SPICE object. More... | |
| void | load (PvlKeyword &key, bool notab) |
| Loads/furnishes NAIF kernel(s) More... | |
Private Attributes | |
| double | p_focalLength |
| The focal length, in units of millimeters. More... | |
| double | p_pixelPitch |
| The pixel pitch, in millimeters per pixel. More... | |
| double | p_minlat |
| The minimum latitude. More... | |
| double | p_maxlat |
| The maximum latitude. More... | |
| double | p_minlon |
| The minimum longitude. More... | |
| double | p_maxlon |
| The maximum longitude. More... | |
| double | p_minres |
| The minimum resolution. More... | |
| double | p_maxres |
| The maximum resolution. More... | |
| double | p_minobliqueres |
| The minimum oblique resolution. More... | |
| double | p_maxobliqueres |
| The maximum oblique resolution. More... | |
| double | p_minlon180 |
| The minimum longitude in the 180 domain. More... | |
| double | p_maxlon180 |
| The maximum longitude in the 180 domain. More... | |
| bool | p_groundRangeComputed |
| Flag showing if ground range was computed successfully. More... | |
| int | p_samples |
| The number of samples in the image. More... | |
| int | p_lines |
| The number of lines in the image. More... | |
| int | p_bands |
| The number of bands in the image. More... | |
| int | p_referenceBand |
| The reference band. More... | |
| Projection * | p_projection |
| A pointer to the Projection. More... | |
| bool | p_ignoreProjection |
| Whether or no to ignore the Projection. More... | |
| double | p_mindec |
| The minimum declination. More... | |
| double | p_maxdec |
| The maximum declination. More... | |
| double | p_minra |
| The minimum right ascension. More... | |
| double | p_maxra |
| The maxumum right ascension. More... | |
| double | p_minra180 |
| The minimum right ascension in the 180 domain. More... | |
| double | p_maxra180 |
| The maximum right ascension in the 180 domain. More... | |
| bool | p_raDecRangeComputed |
| Flag showing if the raDec range has been computed successfully. More... | |
| double | p_minRingRadius |
| The minimum ring radius. More... | |
| double | p_maxRingRadius |
| The maximum ring radius. More... | |
| double | p_minRingLongitude |
| The minimum ring longitude (azimuth) More... | |
| double | p_maxRingLongitude |
| The maximum ring longitude (azimuth) More... | |
| double | p_minRingLongitude180 |
| The minimum ring longitude in the 180 domain. More... | |
| double | p_maxRingLongitude180 |
| The maximum ring longitude in the 180 domain. More... | |
| bool | p_ringRangeComputed |
| Flag showing if ring range was computed successfully. More... | |
| int | p_childBand |
| Band value for child. More... | |
| CameraDistortionMap * | p_distortionMap |
| A pointer to the DistortionMap. More... | |
| CameraFocalPlaneMap * | p_focalPlaneMap |
| A pointer to the FocalPlaneMap. More... | |
| CameraDetectorMap * | p_detectorMap |
| A pointer to the DetectorMap. More... | |
| CameraGroundMap * | p_groundMap |
| A pointer to the GroundMap. More... | |
| CameraSkyMap * | p_skyMap |
| A pointer to the SkyMap. More... | |
| int | p_geometricTilingStartSize |
| The ideal geometric tile size to start with when projecting. More... | |
| int | p_geometricTilingEndSize |
| The ideal geometric tile size to end with when projecting. More... | |
| SpiceDouble | m_ra |
| Right ascension (sky longitude) More... | |
| SpiceDouble | m_dec |
| Decliation (sky latitude) More... | |
| QVector< QString > * | m_kernels |
| Vector containing kernels filenames. More... | |
| iTime * | m_startTime |
| Corrected start (shutter open) time of the observation. More... | |
| iTime * | m_endTime |
| Corrected end (shutter close) time of the observation. More... | |
| SpiceDouble * | m_cacheSize |
| Cache size. Note: This value is 1 for Framing cameras. More... | |
| SpiceDouble * | m_startTimePadding |
| Kernels pvl group StartPadding keyword value. More... | |
| SpiceDouble * | m_endTimePadding |
| Kernels pvl group EndPadding keyword value. More... | |
| SpicePosition * | m_instrumentPosition |
| Instrument spice position. More... | |
| SpiceRotation * | m_instrumentRotation |
| Instrument spice rotation. More... | |
| SpicePosition * | m_sunPosition |
| Sun spice position. More... | |
| SpiceRotation * | m_bodyRotation |
| Body spice rotation. More... | |
| bool | m_allowDownsizing |
| Indicates whether to allow downsizing. More... | |
| SpiceInt * | m_spkCode |
| Spacecraft and planet ephemeris kernel (SPK) code. More... | |
| SpiceInt * | m_ckCode |
| Camera kernel (CK) code. More... | |
| SpiceInt * | m_ikCode |
| Instrument kernel (IK) code. More... | |
| SpiceInt * | m_sclkCode |
| Spacecraft clock correlation kernel (SCLK) code. More... | |
| SpiceInt * | m_spkBodyCode |
| Spacecraft and planet ephemeris kernel (SPK) body code. More... | |
| SpiceInt * | m_bodyFrameCode |
| Naif's BODY_FRAME_CODE value. More... | |
| PvlObject * | m_naifKeywords |
| NaifKeywords PvlObject from cube. More... | |
| bool | m_usingNaif |
| Indicates whether we are reading values from the NaifKeywords PvlObject in cube. More... | |
| bool | m_usingAle |
| Indicate whether we are reading values from an ISD returned from ALE. More... | |
This is the camera model for the Clementine Near Infrared Camera.
Definition at line 64 of file NirCamera.h.
|
inherited |
|
protectedinherited |
| Isis::NirCamera::NirCamera | ( | Cube & | cube | ) |
Constructs a Clementine HiresCamera object using the image labels.
| lab | Pvl label from a Clementine HIRES image. |
Definition at line 37 of file NirCamera.cpp.
References Isis::NaifStatus::CheckErrors(), Isis::iTime::Et(), Isis::Camera::exposureDuration(), Isis::PvlObject::findGroup(), Isis::Spice::getDouble(), Isis::Cube::label(), Isis::Camera::LoadCache(), Isis::Camera::m_instrumentNameLong, Isis::Camera::m_instrumentNameShort, Isis::Camera::m_spacecraftNameLong, Isis::Camera::m_spacecraftNameShort, Isis::Spice::naifIkCode(), Isis::CameraFocalPlaneMap::SetDetectorOrigin(), Isis::Camera::SetFocalLength(), Isis::Camera::SetPixelPitch(), Isis::Sensor::setTime(), ShutterOpenCloseTimes(), Isis::toString(), and Isis::PvlObject::Traverse.
|
inline |
Destroys the NirCamera object.
Definition at line 68 of file NirCamera.h.
|
inherited |
Returns the current band.
Definition at line 2700 of file Camera.cpp.
References Isis::Camera::p_childBand.
Referenced by Isis::Camera::GroundRangeResolution(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), and Isis::Camera::ringRangeResolution().
|
inherited |
Returns the number of bands in the image.
Definition at line 2796 of file Camera.cpp.
References Isis::Camera::p_bands.
Referenced by Isis::ProjectionFactory::CreateForCube(), Isis::CameraStatistics::init(), Isis::ProjectionFactory::RingsCreateForCube(), and Isis::Camera::StartEndEphemerisTimes().
|
inherited |
Writes the basic mapping group to the specified Pvl.
| pvl | Pvl to write mapping group to |
Definition at line 1356 of file Camera.cpp.
References Isis::PvlObject::addGroup(), Isis::Camera::GroundRangeResolution(), Isis::Camera::p_maxlat, Isis::Camera::p_maxlon, Isis::Camera::p_minlat, Isis::Camera::p_minlon, Isis::Camera::p_minres, Isis::Target::radii(), Isis::Spice::radii(), Isis::Spice::target(), and Isis::toString().
Referenced by Isis::ImagePolygon::Create().
|
inherited |
Writes the basic mapping group for ring plane to the specified Pvl.
| pvl | Pvl to write mapping group to |
Definition at line 1385 of file Camera.cpp.
References Isis::PvlObject::addGroup(), Isis::Camera::p_maxRingLongitude, Isis::Camera::p_maxRingRadius, Isis::Camera::p_minres, Isis::Camera::p_minRingLongitude, Isis::Camera::p_minRingRadius, Isis::Camera::ringRangeResolution(), Isis::Spice::target(), Isis::toString(), and Isis::IException::User.
|
virtualinherited |
Accessor method for the body rotation.
Reimplemented in Isis::CSMCamera.
Definition at line 1611 of file Spice.cpp.
Referenced by Isis::Sensor::computeRaDec(), Isis::Sensor::EmissionAngle(), Isis::RadarGroundMap::GetdXYdPosition(), Isis::RadarGroundMap::GetXY(), Isis::Sensor::lookDirectionJ2000(), Isis::MiniRF::MiniRF(), Isis::Sensor::PhaseAngle(), Isis::RadarGroundMap::SetFocalPlane(), Isis::RadarGroundMap::SetGround(), Isis::Sensor::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::Sensor::SetLookDirection(), Isis::Sensor::SetUniversalGround(), and Isis::Sensor::SlantDistance().
|
virtualinherited |
|
inherited |
This method calculates the spice cache size.
This method finds the number of lines in the beta cube and adds 1, since we need at least 2 points for interpolation. This method must be called before a call to the Spice::createCache() method. It is called in the LoadCache() method.
| startTime | Starting ephemeris time to cache |
| endTime | Ending ephemeris time to cache |
| iException::Programmer | - "A cache has already been created." |
Definition at line 2527 of file Camera.cpp.
References Isis::AlphaCube::BetaLines(), and Isis::Camera::p_alphaCube.
Referenced by Isis::Camera::LoadCache().
|
virtualinherited |
|
inherited |
Computes the celestial north clock angle at the current line/sample or ra/dec.
The reference vector is a vecor from the current pixel pointed directly "upward". Celetial North is a vector from the current pixel poiting towards celetial north. The Celestial North Clock Angle is the angle between these two vectors on the image.
Definition at line 3037 of file Camera.cpp.
References Isis::Sensor::Declination(), Isis::Camera::Line(), Isis::PI, Isis::Camera::RaDecResolution(), Isis::Sensor::RightAscension(), Isis::Camera::Sample(), Isis::Camera::SetImage(), and Isis::Camera::SetRightAscensionDeclination().
|
inlinevirtual |
CK frame ID - - Instrument Code from spacit run on CK.
Implements Isis::Camera.
Definition at line 78 of file NirCamera.h.
|
inlinevirtual |
|
privateinherited |
Computes the image azimuth value from your current position (origin) to a point of interest specified by the lat/lon input to this method.
(NOTE: This azimuth is different from a Ground Azimuth)
All azimuths are measured the same way regardless of the image level (level1 or level2) and the shape model being used.
The azimuth is an angle formed by a reference vector and a point of interest vector. The current position is the vertex of the angle, i.e. the origin of the coordinate system on which this angle will be measured. The azimuth is measured in a positive clockwise direction from the reference vector (i.e. the initial ray of the angle) to the point of interest vector (i.e. the terminal ray of the angle).
The azimuth is measured in a positive clockwise direction because images have lines that increase downward. If lines increased upward, then the azimuth would be measure in a positive counterclockwise direction.
The reference vector is the vector from the origin to the right side of the image. This is usually called the 3 o'clock reference vector because the image can be viewed as a clock face and the origin point as the center of the clock face with the hand of the clock pointing at 3 o'clock.
The point of interest vector is the vector along the surface of the body from the origin to the point of interest. In order to calculate the azimuth, this vector is projected into the reference plane (the plane containing the reference vector that is tangent to the surface). The point of interest vector is also unitzed to 1 km in length and then scaled even further to within a pixel of the azimuth's origin.
The algorithm works by
NOTE: All vectors in this method are body-fixed and use the radius of the shape model at the origin point for doing calculations. By using the radius of the shape model at the origin, we avoid problems where the DEM does not completely cover the planet.
Note: This image azimuth algorithm is different from the ground azimuth algorithm used in GroundAzimuth(). For ground azimuths, the initial ray of the angle is the vector from the selected ground point to the north pole. For image azimuths, the initial ray is the vector from the selected image location to the right, horizontally. *
Definition at line 2040 of file Camera.cpp.
References Isis::NaifStatus::CheckErrors(), Isis::Sensor::Coordinate(), Isis::Sensor::HasSurfaceIntersection(), Isis::Distance::isValid(), Isis::Distance::kilometers(), Isis::Camera::Line(), Isis::Sensor::LocalRadius(), Isis::Distance::meters(), Isis::Null, Isis::Camera::p_pointComputed, Isis::PI, Isis::Camera::PixelResolution(), Isis::Camera::Sample(), Isis::Camera::SetImage(), and Isis::Camera::SetUniversalGround().
Referenced by Isis::Camera::NorthAzimuth(), Isis::Camera::SpacecraftAzimuth(), and Isis::Camera::SunAzimuth().
|
privateinherited |
Computes the ra/dec from the look direction.
Protected method which computes the ra/dec of the current look direction.
Definition at line 585 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::SpiceRotation::J2000Vector(), Isis::Sensor::m_dec, Isis::Sensor::m_lookB, Isis::Sensor::m_newLookB, Isis::Sensor::m_ra, and Isis::PI.
Referenced by Isis::Sensor::Declination(), and Isis::Sensor::RightAscension().
|
protectedvirtualinherited |
Computes the solar longitude for the given ephemeris time.
If the target is sky, the longitude is set to -999.0.
| et | Ephemeris time |
Reimplemented in Isis::CSMCamera.
Definition at line 1400 of file Spice.cpp.
References Isis::iTime::Et(), and Isis::Longitude::force360Domain().
|
inherited |
Returns the x,y,z of the surface intersection in BodyFixed km.
| p[] | The coordinate of the surface intersection. |
Definition at line 196 of file Sensor.cpp.
References Isis::Displacement::kilometers(), Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::ControlPoint::ComputeApriori(), Isis::Camera::ComputeAzimuth(), Isis::Camera::DetectorResolution(), Isis::Sensor::EmissionAngle(), Isis::QnetSetAprioriDialog::fillAverageAprioriLineEdits(), Isis::VimsGroundMap::Init(), Isis::Camera::OffNadirAngle(), Isis::Sensor::PhaseAngle(), Isis::Sensor::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::Sensor::SetLookDirection(), Isis::Sensor::SetUniversalGround(), Isis::Sensor::SlantDistance(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
This method creates an internal cache of spacecraft and sun positions over a specified time range.
The SPICE kernels are then immediately unloaded. This allows multiple instances of the Spice object to be created as the NAIF toolkit can clash if multiple sets of SPICE kernels are loaded. Note that the cache size is specified as an argument. Therefore, times requested via setTime() which are not directly loaded in the cache will be interpolated. If the instrument position is not cached and cacheSize is greater than 3, the tolerance is passed to the SpicePosition Memcache2HermiteCache() method.
Note: Before this method is called, the private variables m_cacheSize, m_startTime and m_endTime must be set. This is done in the Camera classes using the methods SetCacheSize() and SetStartEndEphemerisTime().
| startTime | Starting ephemeris time to cache |
| endTime | Ending ephemeris time to cache |
| size | Size of the cache. |
| tol | Tolerance. |
| Isis::IException::Programmer | - "Argument cacheSize must be greater than zero" |
| Isis::IException::Programmer | - "Argument startTime must be less than or equal to endTime" |
| Isis::IException::User | - "This instrument does not support time padding" |
Definition at line 649 of file Spice.cpp.
References Isis::iTime::Et(), and Isis::FileName::expanded().
Referenced by Isis::CrismCamera::CrismCamera(), Isis::Camera::LoadCache(), and Isis::MiniRF::MiniRF().
|
virtualinherited |
Returns the declination angle (sky latitude).
Reimplemented in Isis::CSMCamera.
Definition at line 574 of file Sensor.cpp.
References Isis::Sensor::computeRaDec(), Isis::Sensor::m_dec, and Isis::Sensor::m_newLookB.
Referenced by Isis::Camera::CelestialNorthClockAngle(), Isis::VimsSkyMap::Init(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::Camera::RawFocalPlanetoImage(), and Isis::AdvancedTrackTool::updateRow().
|
privateinherited |
|
inherited |
Returns a pointer to the CameraDetectorMap object.
Definition at line 2846 of file Camera.cpp.
References Isis::Camera::p_detectorMap.
Referenced by Isis::LineScanCamera::DetectorMap(), Isis::PushFrameCamera::DetectorMap(), Isis::RollingShutterCamera::DetectorMap(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::PushFrameCameraGroundMap::FindSpacecraftDistance(), Isis::Camera::PixelIfovOffsets(), Isis::PushFrameCameraGroundMap::SetGround(), and Isis::LineScanCameraSkyMap::SetSky().
|
virtualinherited |
Returns the detector resolution at the current position in meters.
Reimplemented in Isis::CSMCamera.
Definition at line 608 of file Camera.cpp.
References Isis::Sensor::Coordinate(), Isis::Sensor::HasSurfaceIntersection(), Isis::Spice::instrumentPosition(), Isis::Null, Isis::Camera::p_focalLength, and Isis::Camera::p_pixelPitch.
Referenced by Isis::Camera::LineResolution(), Isis::Camera::ObliqueDetectorResolution(), and Isis::Camera::SampleResolution().
|
inherited |
Returns a pointer to the CameraDistortionMap object.
Definition at line 2826 of file Camera.cpp.
References Isis::Camera::p_distortionMap.
Referenced by Isis::ControlPoint::ComputeApriori(), Isis::ControlPoint::ComputeResiduals(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::PixelFOV::instantaneousFov(), Isis::LroWideAngleCamera::SetBand(), Isis::MarciCamera::SetBand(), Isis::ThemisIrCamera::SetBand(), Isis::LineScanCameraSkyMap::SetSky(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Returns the emission angle in degrees.
Reimplemented in Isis::CSMCamera.
Definition at line 324 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::Sensor::Coordinate(), Isis::ShapeModel::emissionAngle(), Isis::Spice::instrumentPosition(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::CameraStatistics::addStats(), Isis::ImagePolygon::FixPolePoly(), Isis::InterestOperator::InterestByMeasure(), Isis::Camera::ObliqueDetectorResolution(), Isis::Camera::OffNadirAngle(), Isis::ImagePolygon::SetImage(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Return the exposure duration for the pixel that the camera is set to.
Definition at line 3063 of file Camera.cpp.
References Isis::CameraDetectorMap::exposureDuration(), Isis::Camera::p_childBand, Isis::Camera::p_childLine, Isis::Camera::p_childSample, and Isis::Camera::p_detectorMap.
Referenced by Isis::DawnFcCamera::DawnFcCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IdealCamera::IdealCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::PixelFOV::latLonVertices(), Isis::LwirCamera::LwirCamera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::ApolloMetricCamera::ShutterOpenCloseTimes(), Isis::IssNACamera::ShutterOpenCloseTimes(), Isis::IssWACamera::ShutterOpenCloseTimes(), Isis::HiresCamera::ShutterOpenCloseTimes(), Isis::LwirCamera::ShutterOpenCloseTimes(), ShutterOpenCloseTimes(), Isis::UvvisCamera::ShutterOpenCloseTimes(), Isis::ClipperWacFcCamera::ShutterOpenCloseTimes(), Isis::DawnFcCamera::ShutterOpenCloseTimes(), Isis::SsiCamera::ShutterOpenCloseTimes(), Isis::HayabusaAmicaCamera::ShutterOpenCloseTimes(), Isis::HayabusaNirsCamera::ShutterOpenCloseTimes(), Isis::Hyb2OncCamera::ShutterOpenCloseTimes(), Isis::JunoCamera::ShutterOpenCloseTimes(), Isis::LoHighCamera::ShutterOpenCloseTimes(), Isis::LoMediumCamera::ShutterOpenCloseTimes(), Isis::Mariner10Camera::ShutterOpenCloseTimes(), Isis::MdisCamera::ShutterOpenCloseTimes(), Isis::MexHrscSrcCamera::ShutterOpenCloseTimes(), Isis::MsiCamera::ShutterOpenCloseTimes(), Isis::NewHorizonsLorriCamera::ShutterOpenCloseTimes(), Isis::NewHorizonsMvicFrameCamera::ShutterOpenCloseTimes(), Isis::OsirisRexOcamsCamera::ShutterOpenCloseTimes(), Isis::RosettaOsirisCamera::ShutterOpenCloseTimes(), Isis::TgoCassisCamera::ShutterOpenCloseTimes(), Isis::VikingCamera::ShutterOpenCloseTimes(), Isis::VoyagerCamera::ShutterOpenCloseTimes(), Isis::FramingCamera::ShutterOpenCloseTimes(), Isis::SsiCamera::SsiCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
virtualinherited |
Return the exposure duration for the pixel at the given line, sample and band.
| sample | The sample of the desired pixel. |
| line | The line of the desired pixel. |
| band | The band of the desired pixel. Defaults to 1. |
Definition at line 3077 of file Camera.cpp.
References Isis::CameraDetectorMap::exposureDuration(), Isis::Camera::p_childBand, and Isis::Camera::p_detectorMap.
|
inherited |
Returns the focal length.
Definition at line 2732 of file Camera.cpp.
References Isis::Camera::p_focalLength.
Referenced by Isis::CrismCamera::CrismCamera(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::PixelFOV::instantaneousFov(), Isis::Camera::LoadCache(), Isis::MiniRF::MiniRF(), Isis::MocWideAngleDistortionMap::SetFocalPlane(), Isis::CameraSkyMap::SetSky(), Isis::LineScanCameraSkyMap::SetSky(), Isis::MocWideAngleDistortionMap::SetUndistortedFocalPlane(), and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
|
inherited |
Returns a pointer to the CameraFocalPlaneMap object.
Definition at line 2836 of file Camera.cpp.
References Isis::Camera::p_focalPlaneMap.
Referenced by Isis::ControlPoint::ComputeResiduals(), Isis::DawnVirCamera::DawnVirCamera(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::HrscCamera::HrscCamera(), Isis::MarciCamera::MarciCamera(), Isis::OsirisRexDistortionMap::OsirisRexDistortionMap(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::LroWideAngleCamera::SetBand(), Isis::ThemisIrCamera::SetBand(), Isis::NewHorizonsLeisaCamera::SetBand(), Isis::LoMediumDistortionMap::SetDistortion(), Isis::ReseauDistortionMap::SetFocalPlane(), Isis::LoMediumDistortionMap::SetFocalPlane(), Isis::LineScanCameraDetectorMap::SetParent(), Isis::VariableLineScanCameraDetectorMap::SetParent(), Isis::LineScanCameraSkyMap::SetSky(), Isis::ReseauDistortionMap::SetUndistortedFocalPlane(), Isis::LoMediumDistortionMap::SetUndistortedFocalPlane(), and Isis::AdvancedTrackTool::updateRow().
|
inlinevirtualinherited |
This method returns Framing camera type.
Implements Isis::Camera.
Definition at line 43 of file FramingCamera.h.
References Isis::Camera::Framing.
|
virtualinherited |
This converts the spacecraft clock ticks value (clockValue) to an iTime.
If the clock ticks value is provided directly, rather than the spacecraft clock string, set clockTicks=true.
Use this when possible because naif calls (such as scs2e_c) cannot be called when not using naif.
Definition at line 1053 of file Spice.cpp.
References Isis::toString().
Referenced by Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::VimsGroundMap::Init(), Isis::VimsSkyMap::Init(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::MarciCamera::MarciCamera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::DawnVirCamera::readHouseKeeping(), Isis::RosettaVirtisCamera::readHouseKeeping(), Isis::RosettaVirtisCamera::readSCET(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::VikingCamera::VikingCamera(), and Isis::VimsCamera::VimsCamera().
|
inherited |
This returns a value from the NAIF text pool.
It is a static convience method
| key | Name of NAIF keyword to obtain from the pool |
| index | If the keyword is an array, the element to obtain. Defaults to 0 |
| Isis::iException::Io | - "Can not find key in instrument kernels." |
Definition at line 1039 of file Spice.cpp.
Referenced by Isis::LroWideAngleCameraDistortionMap::addFilter(), Isis::LroWideAngleCameraFocalPlaneMap::addFilter(), Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::MdisCamera::computeFocalLength(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::CameraFocalPlaneMap::Init(), Isis::RosettaOsirisCamera::initDistortion(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::KaguyaTcCameraDistortionMap::KaguyaTcCameraDistortionMap(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::MarciDistortionMap::MarciDistortionMap(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::KaguyaMiCameraDistortionMap::SetDistortion(), Isis::LroNarrowAngleDistortionMap::SetDistortion(), Isis::TaylorCameraDistortionMap::SetDistortion(), Isis::Camera::SetFocalLength(), Isis::Camera::SetPixelPitch(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::TgoCassisDistortionMap::TgoCassisDistortionMap(), and Isis::UvvisCamera::UvvisCamera().
|
inherited |
This will get the geometric tiling hint; these values are typically used for ProcessRubberSheet::SetTiling(...).
| startSize | Tiling start size |
| endSize | Tiling end size |
Definition at line 2605 of file Camera.cpp.
References Isis::Camera::p_geometricTilingEndSize, and Isis::Camera::p_geometricTilingStartSize.
|
inherited |
This returns a value from the NAIF text pool.
It is a static convience
| key | Name of NAIF keyword to obtain from the pool |
| index | If the keyword is an array, the element to obtain. Defaults to 0 |
| Isis::iException::Io | - "Can not find key in instrument kernels |
Definition at line 1025 of file Spice.cpp.
Referenced by Isis::DawnVirCamera::getPointingTable(), Isis::RosettaVirtisCamera::getPointingTable(), Isis::LroWideAngleCamera::GetVector(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), and Isis::LroWideAngleCamera::LroWideAngleCamera().
|
inherited |
Returns a planetocentric latitude object at the surface intersection point in body fixed.
Definition at line 221 of file Sensor.cpp.
References Isis::SurfacePoint::GetLatitude(), Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::StereoTool::calculateElevation(), and Isis::Sensor::UniversalLatitude().
|
inherited |
This method will find the local normal at the current (sample, line) and set it to the passed in array.
| [out] | normal | The local normal vector to be calculated. |
Definition at line 1488 of file Camera.cpp.
References Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLongitude(), Isis::Sensor::GetSurfacePoint(), Isis::ShapeModel::hasIntersection(), Isis::ShapeModel::hasNormal(), Isis::ShapeModel::isDEM(), Isis::Distance::kilometers(), Isis::Camera::Line(), Isis::Sensor::LocalRadius(), Isis::ShapeModel::normal(), Isis::Camera::p_pointComputed, Isis::Angle::radians(), Isis::Camera::Sample(), Isis::Camera::SetImage(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::Camera::LocalPhotometricAngles().
|
inherited |
Returns a positive east, 0-360 domain longitude object at the surface intersection point in the body fixed coordinate system.
Definition at line 245 of file Sensor.cpp.
References Isis::SurfacePoint::GetLongitude(), Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::StereoTool::calculateElevation(), and Isis::Sensor::UniversalLongitude().
|
inherited |
|
inherited |
This returns a value from the NAIF text pool.
It is a static convience method
| key | Name of NAIF keyword to obtain from the pool |
| index | If the keyword is an array, the element to obtain. Defaults to 0 |
| Isis::IException::Io | - "Can not find key in instrument kernels." |
Definition at line 1261 of file Spice.cpp.
Referenced by Isis::LightTimeCorrectionState::checkAberrationCorrection(), Isis::LightTimeCorrectionState::checkLightTimeToSurfaceCorrect(), Isis::LightTimeCorrectionState::checkObserverTargetSwap(), Isis::MdisCamera::computeFocalLength(), Isis::MdisCamera::MdisCamera(), and Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera().
|
inherited |
Returns the surface point (most efficient accessor).
Definition at line 255 of file Sensor.cpp.
References Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::ControlPoint::ComputeResiduals(), Isis::QnetSetAprioriDialog::fillReferenceAprioriLineEdits(), Isis::QnetPointDistanceFilter::filter(), Isis::Camera::GetLocalNormal(), Isis::CSMCamera::GroundPartials(), Isis::CSMCamera::ImagePartials(), Isis::CSMCamera::IncidenceAngle(), Isis::Camera::LocalPhotometricAngles(), Isis::CSMCamera::PhaseAngle(), Isis::SunShadowTool::recalculateShadowHeight(), and Isis::CSMCamera::SlantDistance().
|
staticinherited |
Computes and returns the ground azimuth between the ground point and another point of interest, such as the subspacecraft point or the subsolar point.
The ground azimuth is the clockwise angle on the ground between a line drawn from the ground point to the North pole of the body and a line drawn from the selected point on the surface to some point of interest on the surface (such as the subsolar point or the subspacecraft point).
Note: This is different from the image azimuth algorithm used in ComputeAzimuth(). For ground azimuths, the initial ray of the angle is the vector from the selected ground point to the north pole. For image azimuths, the initial ray is the vector from the selected image location to the right, horizontally.
| glat | The latitude of the ground point |
| glon | The longitude of the ground point |
| slat | The latitude of the subspacecraft or subsolar point |
| slon | The longitude of the subspacecraft or subsolar point |
Definition at line 2237 of file Camera.cpp.
References Isis::PI.
|
inherited |
Returns a pointer to the CameraGroundMap object.
Definition at line 2856 of file Camera.cpp.
References Isis::Camera::p_groundMap.
Referenced by Isis::IsisBundleObservation::computeImagePartials(), Isis::BundleAdjust::computePartials(), Isis::IsisBundleObservation::computePoint3DPartials(), Isis::ControlPoint::ComputeResiduals(), Isis::ControlPoint::ComputeResiduals_Millimeters(), Isis::IsisBundleObservation::computeRHSPartials(), Isis::IsisBundleObservation::computeTargetPartials(), Isis::LineScanCamera::GroundMap(), Isis::PushFrameCamera::GroundMap(), and Isis::VimsCamera::VimsCamera().
|
inherited |
Computes the Ground Range.
| minlat | The minimum latitude |
| maxlat | The maximum latitude |
| minlon | The minimum longitude |
| maxlon | The maximum longitude |
| pvl | The pvl file used for ground range calculations |
Definition at line 1182 of file Camera.cpp.
References Isis::PvlObject::findGroup(), Isis::Camera::GroundRangeResolution(), Isis::PvlContainer::hasKeyword(), Isis::Distance::Meters, Isis::Camera::p_maxlat, Isis::Camera::p_maxlon, Isis::Camera::p_maxlon180, Isis::Camera::p_minlat, Isis::Camera::p_minlon, Isis::Camera::p_minlon180, Isis::PI, Isis::Spice::radii(), Isis::toDouble(), and Isis::PvlObject::Traverse.
Referenced by Isis::UniversalGroundMap::GroundRange(), and Isis::Camera::IntersectsLongitudeDomain().
|
privateinherited |
Computes the ground range and min/max resolution.
Definition at line 741 of file Camera.cpp.
References Isis::Camera::Band(), Isis::Angle::Degrees, Isis::Camera::IsBandIndependent(), Isis::Distance::isValid(), Isis::Camera::Line(), Isis::Sensor::LocalRadius(), Isis::Camera::ObliquePixelResolution(), Isis::Camera::p_bands, Isis::Camera::p_groundRangeComputed, Isis::Camera::p_lines, Isis::Camera::p_maxlat, Isis::Camera::p_maxlon, Isis::Camera::p_maxlon180, Isis::Camera::p_maxobliqueres, Isis::Camera::p_maxres, Isis::Camera::p_minlat, Isis::Camera::p_minlon, Isis::Camera::p_minlon180, Isis::Camera::p_minobliqueres, Isis::Camera::p_minres, Isis::Camera::p_pointComputed, Isis::Camera::p_samples, Isis::Camera::PixelResolution(), Isis::IException::Programmer, Isis::Camera::Sample(), Isis::Camera::SetBand(), Isis::Camera::SetGround(), Isis::Camera::SetImage(), Isis::Spice::subSpacecraftPoint(), Isis::Spice::target(), Isis::Sensor::UniversalLatitude(), Isis::Sensor::UniversalLongitude(), and Isis::IException::Unknown.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::GroundRange(), Isis::Camera::HighestImageResolution(), Isis::Camera::HighestObliqueImageResolution(), Isis::Camera::LowestImageResolution(), and Isis::Camera::LowestObliqueImageResolution().
|
inherited |
Returns true if the kernel group has kernel files.
| lab | Label containing Instrument and Kernels groups. |
Definition at line 1526 of file Spice.cpp.
References Isis::PvlObject::findGroup(), Isis::PvlContainer::hasKeyword(), and Isis::PvlKeyword::size().
|
inherited |
Checks to see if the camera object has a projection.
Definition at line 2638 of file Camera.cpp.
References Isis::Camera::p_projection.
Referenced by Isis::CubeViewport::CubeViewport(), and Isis::ImagePolygon::initCube().
|
inherited |
Checks to see if the Camera object has a reference band.
Definition at line 2670 of file Camera.cpp.
References Isis::Camera::p_referenceBand.
Referenced by Isis::ThemisVisCamera::BandEphemerisTimeOffset(), and Isis::ThemisIrCamera::SetBand().
|
inherited |
Returns if the last call to either SetLookDirection or SetUniversalGround had a valid intersection with the target.
If so then other methods such as Coordinate, UniversalLatitude, UniversalLongitude, etc can be used with confidence.
Definition at line 186 of file Sensor.cpp.
References Isis::ShapeModel::hasIntersection(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::CameraStatistics::addStats(), Isis::Camera::ComputeAzimuth(), Isis::Camera::DetectorResolution(), Isis::Chip::Load(), Isis::Camera::ObliqueDetectorResolution(), Isis::VimsGroundMap::SetGround(), and Isis::Camera::SetImageSkyMapProjection().
|
inherited |
Returns the highest/best resolution in the entire image.
Definition at line 710 of file Camera.cpp.
References Isis::Camera::GroundRangeResolution(), and Isis::Camera::p_minres.
|
inherited |
Returns the highest/best oblique resolution in the entire image.
Definition at line 732 of file Camera.cpp.
References Isis::Camera::GroundRangeResolution(), and Isis::Camera::p_maxobliqueres.
|
inherited |
This allows you to ignore the cube elevation model and use the ellipse.
| ignore | Indicates whether the elevation model is ignored. |
Definition at line 60 of file Sensor.cpp.
References Isis::Target::restoreShape(), Isis::Target::setShapeEllipsoid(), and Isis::Spice::target().
Referenced by Isis::StereoTool::calculateElevation(), Isis::ImagePolygon::Create(), and Isis::ImagePolygon::initCube().
|
inherited |
Set whether or not the camera should ignore the Projection.
| ignore |
Definition at line 2925 of file Camera.cpp.
References Isis::Camera::p_ignoreProjection.
Referenced by Isis::VimsGroundMap::Init(), Isis::VimsSkyMap::Init(), Isis::VimsGroundMap::SetGround(), Isis::VimsSkyMap::SetSky(), and Isis::VimsCamera::VimsCamera().
|
virtualinherited |
Returns the incidence angle in degrees.
This does not use the surface model.
Reimplemented in Isis::CSMCamera.
Definition at line 335 of file Sensor.cpp.
References Isis::ShapeModel::incidenceAngle(), Isis::Spice::m_uB, Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::CameraStatistics::addStats(), Isis::ImagePolygon::FixPolePoly(), Isis::InterestOperator::InterestByMeasure(), Isis::SunShadowTool::recalculateShadowHeight(), Isis::ImagePolygon::SetImage(), and Isis::AdvancedTrackTool::updateRow().
|
inherited |
This returns true if the current Sample() or Line() value is outside of the cube (meaning the point must have been extrapolated).
Definition at line 2619 of file Camera.cpp.
References Isis::Camera::Line(), Isis::Camera::Lines(), Isis::Camera::Sample(), and Isis::Camera::Samples().
Referenced by Isis::MosaicSceneItem::drawImage(), Isis::InterestOperator::FindCnetRef(), Isis::SmtkMatcher::getLineSample(), Isis::UniversalGroundMap::SetGround(), Isis::UniversalGroundMap::SetUnboundGround(), and Isis::UniversalGroundMap::SetUniversalGround().
|
privateinherited |
Initialization of Spice object.
| lab | Pvl labels |
| noTables | Indicates the use of tables. |
| Isis::IException::Io | - "Can not find NAIF code for NAIF target" |
| Isis::IException::Camera | - "No camera pointing available" |
| Isis::IException::Camera | - "No instrument position available" |
Definition at line 154 of file Spice.cpp.
References Isis::LightTimeCorrectionState::checkSpkKernelsForAberrationCorrection(), Isis::PvlContainer::fileName(), Isis::PvlObject::findGroup(), Isis::PvlObject::findObject(), Isis::PvlObject::hasKeyword(), Isis::PvlContainer::hasKeyword(), Isis::PvlObject::hasObject(), Isis::Table::Label(), Isis::toDouble(), Isis::toInt(), and Isis::toString().
|
virtualinherited |
Returns the spacecraft position in body-fixed frame km units.
| p[] | Spacecraft position |
| Isis::iException::Programmer | - "You must call SetTime first" |
Reimplemented in Isis::CSMCamera.
Definition at line 835 of file Spice.cpp.
Referenced by Isis::Camera::LocalPhotometricAngles().
|
virtualinherited |
|
inherited |
This method returns the InstrumentId as it appears in the cube.
Definition at line 2876 of file Camera.cpp.
References Isis::Camera::m_instrumentId.
Referenced by Isis::GuiCamera::GuiCamera(), and Isis::RosettaVirtisCamera::RosettaVirtisCamera().
|
virtualinherited |
This method returns the full instrument name.
Implements Isis::Sensor.
Reimplemented in Isis::IdealCamera.
Definition at line 2886 of file Camera.cpp.
References Isis::Camera::m_instrumentNameLong.
Referenced by Isis::GuiCamera::GuiCamera().
|
virtualinherited |
This method returns the shortened instrument name.
Implements Isis::Sensor.
Reimplemented in Isis::IdealCamera.
Definition at line 2896 of file Camera.cpp.
References Isis::Camera::m_instrumentNameShort.
Referenced by Isis::GuiCamera::GuiCamera().
|
virtualinherited |
Accessor method for the instrument position.
Reimplemented in Isis::CSMCamera.
Definition at line 1600 of file Spice.cpp.
Referenced by Isis::Camera::DetectorResolution(), Isis::Sensor::EmissionAngle(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MiniRF::MiniRF(), Isis::Camera::OffNadirAngle(), Isis::Sensor::PhaseAngle(), Isis::Sensor::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::Sensor::SetLookDirection(), Isis::Sensor::SetUniversalGround(), Isis::Sensor::SlantDistance(), and Isis::Sensor::SpacecraftAltitude().
|
inherited |
Returns the spacecraft position in body-fixed frame km units.
| p[] | Spacecraft position |
| Isis::iException::Programmer | - "You must call SetTime first" |
Definition at line 822 of file Spice.cpp.
Referenced by Isis::RadarGroundMap::GetdXYdPosition(), Isis::RadarGroundMap::GetXY(), Isis::RadarGroundMap::SetFocalPlane(), Isis::RadarGroundMap::SetGround(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Accessor method for the instrument rotation.
Reimplemented in Isis::CSMCamera.
Definition at line 1622 of file Spice.cpp.
Referenced by Isis::DawnVirCamera::DawnVirCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::Sensor::LookDirection(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::RosettaVirtisCamera::readSCET(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::RadarGroundMap::SetFocalPlane(), Isis::RadarGroundMap::SetGround(), Isis::Sensor::SetLookDirection(), Isis::Sensor::SetRightAscensionDeclination(), and Isis::TgoCassisCamera::TgoCassisCamera().
|
inherited |
Checks whether the ground range intersects the longitude domain or not.
| pvl | The pvl file used to set the ground range |
Definition at line 1165 of file Camera.cpp.
References Isis::Camera::GroundRange().
|
virtualinherited |
Virtual method that checks if the band is independent.
Reimplemented in Isis::ThemisVisCamera, Isis::ThemisIrCamera, Isis::NewHorizonsLeisaCamera, Isis::MarciCamera, Isis::CrismCamera, and Isis::LroWideAngleCamera.
Definition at line 2649 of file Camera.cpp.
Referenced by Isis::ProjectionFactory::CreateForCube(), Isis::Camera::GroundRangeResolution(), Isis::CameraStatistics::init(), Isis::Camera::RaDecRange(), Isis::Camera::ringRangeResolution(), and Isis::ProjectionFactory::RingsCreateForCube().
|
inherited |
Returns true if time has been initialized.
Definition at line 1577 of file Spice.cpp.
Referenced by Isis::CameraDetectorMap::SetParent(), and Isis::RollingShutterCameraDetectorMap::SetParent().
|
virtualinherited |
Returns the current line number.
Definition at line 2710 of file Camera.cpp.
References Isis::Camera::p_childLine.
Referenced by Isis::QnetTool::addMeasure(), Isis::Camera::CelestialNorthClockAngle(), Isis::Camera::ComputeAzimuth(), Isis::ControlPoint::ComputeResiduals_Millimeters(), Isis::CsmBundleObservation::computeRHSPartials(), Isis::ControlPointEditWidget::createControlPoint(), Isis::QnetTool::createFixedPoint(), Isis::ProjectionFactory::CreateForCube(), Isis::QnetTool::createPoint(), Isis::MosaicSceneItem::drawImage(), Isis::InterestOperator::FindCnetRef(), Isis::ImagePolygon::FixPolePoly(), Isis::SmtkMatcher::getLineSample(), Isis::Camera::GetLocalNormal(), Isis::Camera::GroundRangeResolution(), Isis::Camera::InCube(), Isis::UniversalGroundMap::Line(), Isis::Chip::Load(), Isis::CSMCamera::parentLine(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), and Isis::Camera::ringRangeResolution().
|
virtualinherited |
Returns the line resolution at the current position in meters.
Reimplemented in Isis::CSMCamera.
Definition at line 649 of file Camera.cpp.
References Isis::Camera::DetectorResolution(), Isis::CameraDetectorMap::LineScaleFactor(), and Isis::Camera::p_detectorMap.
Referenced by Isis::CameraStatistics::addStats(), and Isis::Camera::PixelResolution().
|
inherited |
Returns the number of lines in the image.
Definition at line 2786 of file Camera.cpp.
References Isis::Camera::p_lines.
Referenced by Isis::QnetTool::addMeasure(), Isis::ProjectionFactory::CreateForCube(), Isis::Camera::InCube(), Isis::SmtkMatcher::inCube(), Isis::CameraStatistics::init(), Isis::NewHorizonsMvicFrameCameraDistortionMap::NewHorizonsMvicFrameCameraDistortionMap(), Isis::DawnVirCamera::readHouseKeeping(), Isis::RosettaVirtisCamera::readHouseKeeping(), and Isis::ProjectionFactory::RingsCreateForCube().
|
privateinherited |
Loads/furnishes NAIF kernel(s)
| key | PvlKeyword |
| noTables | Indicates the use of tables. |
| Isis::IException::Io | - "Spice file does not exist." |
Definition at line 486 of file Spice.cpp.
References Isis::FileName::expanded(), Isis::FileName::fileExists(), and Isis::PvlKeyword::size().
|
inherited |
This loads the spice cache big enough for this image.
The default cache size is the number of lines in the cube if the ephemeris time changes in the image, one otherwise.
Definition at line 2420 of file Camera.cpp.
References Isis::AlphaCube::BetaLines(), Isis::AlphaCube::BetaSamples(), Isis::Camera::CacheSize(), Isis::Spice::createCache(), Isis::Camera::FocalLength(), Isis::Camera::p_alphaCube, Isis::Camera::p_ignoreProjection, Isis::Camera::PixelPitch(), Isis::Camera::PixelResolution(), Isis::Camera::SetBand(), Isis::Camera::SetImage(), Isis::Sensor::setTime(), Isis::Sensor::SpacecraftAltitude(), Isis::Camera::StartEndEphemerisTimes(), and Isis::Spice::target().
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IdealCamera::IdealCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
inherited |
Calculates LOCAL photometric angles using the DEM (not ellipsoid).
These calculations are more expensive computationally than Sensor's angle getter methods. Furthermore, this cost is mostly in calculating the local normal vector, which can be done only once for all angles using this method.
| phase | The local phase angle to be calculated |
| incidence | The local incidence angle to be calculated |
| emission | The local emission angle to be calculated |
| success | A boolean to keep track of whether normal is valid |
Definition at line 1642 of file Camera.cpp.
References Isis::Camera::GetLocalNormal(), Isis::Sensor::GetSurfacePoint(), Isis::Spice::instrumentBodyFixedPosition(), Isis::Displacement::kilometers(), Isis::Spice::m_uB, Isis::Null, and Isis::Angle::Radians.
Referenced by Isis::AdvancedTrackTool::updateRow().
|
inherited |
Returns the local radius at the intersection point.
This is either the radius on the ellipsoid, the radius from the surface model passed into the constructor, or the radius set with SetUniversalGround.
Definition at line 267 of file Sensor.cpp.
References Isis::SurfacePoint::GetLocalRadius(), Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::CameraStatistics::addStats(), Isis::StereoTool::calculateElevation(), Isis::Camera::ComputeAzimuth(), Isis::ControlNetFilter::CubeDistanceFilter(), Isis::FindTool::distancePerPixel(), Isis::QnetCubeDistanceFilter::filter(), Isis::Camera::GetLocalNormal(), Isis::Camera::GroundRangeResolution(), Isis::RadarGroundMap::Iterate(), Isis::ControlNetFilter::PointDistanceFilter(), Isis::ControlNetFilter::PointLatLonFilter(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::ringRangeResolution(), Isis::ProjectionFactory::RingsCreateForCube(), Isis::LineScanCameraGroundMap::SetGround(), Isis::PushFrameCameraGroundMap::SetGround(), Isis::RadarGroundMap::SetGround(), Isis::VimsGroundMap::SetGround(), Isis::Camera::SetGround(), Isis::CSMCamera::SetGround(), Isis::Camera::SetImageMapProjection(), Isis::Sensor::SpacecraftAltitude(), Isis::TrackTool::updateLabels(), and Isis::AdvancedTrackTool::updateRow().
|
inherited |
Returns the local radius at the intersection point.
This is either the radius on the ellipsoid, the radius from the surface model passed into the constructor, or the radius set with SetUniversalGround.
| lat | |
| lon |
Definition at line 301 of file Sensor.cpp.
References Isis::Angle::Degrees, Isis::Target::shape(), and Isis::Spice::target().
Returns the local radius at the intersection point.
This is either the radius on the ellipsoid, the radius from the surface model passed into the constructor, or the radius set with SetUniversalGround.
| lat | |
| lon |
Definition at line 285 of file Sensor.cpp.
References Isis::Target::shape(), and Isis::Spice::target().
|
inherited |
Return the local solar time in hours.
Definition at line 660 of file Sensor.cpp.
References Isis::Spice::subSolarPoint(), and Isis::Sensor::UniversalLongitude().
Referenced by Isis::CameraStatistics::addStats(), and Isis::AdvancedTrackTool::updateRow().
|
inherited |
Returns the look direction in the camera coordinate system.
| v[] | The look vector. |
Definition at line 523 of file Sensor.cpp.
References Isis::Spice::instrumentRotation(), Isis::Sensor::lookDirectionJ2000(), and Isis::SpiceRotation::ReferenceVector().
Referenced by Isis::PixelFOV::instantaneousFov().
|
inherited |
Returns the look direction in the body fixed coordinate system.
Definition at line 535 of file Sensor.cpp.
References Isis::Sensor::m_lookB.
Referenced by Isis::Sensor::lookDirectionJ2000(), and Isis::Sensor::SetGroundLocal().
|
inherited |
Returns the look direction in the camera coordinate system.
Definition at line 549 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::SpiceRotation::J2000Vector(), and Isis::Sensor::lookDirectionBodyFixed().
Referenced by Isis::Sensor::LookDirection().
|
inherited |
Returns the lowest/worst resolution in the entire image.
Definition at line 699 of file Camera.cpp.
References Isis::Camera::GroundRangeResolution(), and Isis::Camera::p_maxres.
|
inherited |
Returns the lowest/worst oblique resolution in the entire image.
Definition at line 721 of file Camera.cpp.
References Isis::Camera::GroundRangeResolution(), and Isis::Camera::p_minobliqueres.
|
inherited |
This returns the NAIF body code of the target indicated in the labels.
Definition at line 941 of file Spice.cpp.
Referenced by Isis::Camera::SpkCenterId().
|
inherited |
|
inherited |
|
inherited |
This returns the NAIF IK code to use when reading from instrument kernels.
Definition at line 968 of file Spice.cpp.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::Camera::SetFocalLength(), Isis::Camera::SetPixelPitch(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
inherited |
This returns the NAIF SCLK code to use when reading from instrument kernels.
Definition at line 978 of file Spice.cpp.
Referenced by Isis::CrismCamera::CrismCamera().
|
inherited |
This returns the NAIF SPK code to use when reading from SPK kernels.
Definition at line 950 of file Spice.cpp.
Referenced by Isis::DawnVirCamera::readHouseKeeping(), Isis::RosettaVirtisCamera::readHouseKeeping(), Isis::RosettaVirtisCamera::readSCET(), and Isis::Camera::SpkTargetId().
|
inherited |
Returns the North Azimuth.
Definition at line 1893 of file Camera.cpp.
References Isis::Camera::ComputeAzimuth(), Isis::IException::Programmer, Isis::Spice::target(), and Isis::Sensor::UniversalLatitude().
Referenced by Isis::CameraStatistics::addStats(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
This method returns the Oblique Detector Resolution if the Look Vector intersects the target and if the emission angle is greater than or equal to 0, and less than 90 degrees.
Otherwise, it returns -1.0. This formula provides an improved estimate to the detector resolution for images near the limb:
\[ \text{Oblique\;\;Detector\;\; Resolution} = \frac{n}{cos(\theta)} \]
The equation is derived two separate ways. A geometric argument is presented in Reference 2, while a matrix algebra based argument is presented in Theorem 2.1 of Reference 1.
Reference 1: J-M Morel and G. Yu, "Asift: A new framework for fully affine invariant image comparison," SIAM Journal on Imaging Sciences 2(2), pp. 438-469, 2009
Reference 2: Handwritten notes by Orrin Thomas which can be found in the Glossary under the entry for Oblique Detector Resolution.
Reimplemented in Isis::CSMCamera.
Definition at line 582 of file Camera.cpp.
References Isis::DEG2RAD, Isis::Camera::DetectorResolution(), Isis::Sensor::EmissionAngle(), Isis::HALFPI, Isis::Sensor::HasSurfaceIntersection(), and Isis::Null.
Referenced by Isis::Camera::ObliqueLineResolution(), and Isis::Camera::ObliqueSampleResolution().
|
virtualinherited |
Returns the oblique line resolution at the current position in meters.
This provides a more accurate estimate of the line resolution at oblique angles.
Reimplemented in Isis::CSMCamera.
Definition at line 661 of file Camera.cpp.
References Isis::CameraDetectorMap::LineScaleFactor(), Isis::Camera::ObliqueDetectorResolution(), and Isis::Camera::p_detectorMap.
Referenced by Isis::CameraStatistics::addStats(), and Isis::Camera::ObliquePixelResolution().
|
virtualinherited |
Returns the oblique pixel resolution at the current position in meters/pixel.
This provides a more accurate estimate of the pixel resolution at oblique angles.
Definition at line 685 of file Camera.cpp.
References Isis::Null, Isis::Camera::ObliqueLineResolution(), and Isis::Camera::ObliqueSampleResolution().
Referenced by Isis::CameraStatistics::addStats(), Isis::Camera::GroundRangeResolution(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Returns the oblique sample resolution at the current position in m.
This gives a more accurate estimate of the sample resolution at oblique angles.
Reimplemented in Isis::CSMCamera.
Definition at line 639 of file Camera.cpp.
References Isis::Camera::ObliqueDetectorResolution(), Isis::Camera::p_detectorMap, and Isis::CameraDetectorMap::SampleScaleFactor().
Referenced by Isis::CameraStatistics::addStats(), and Isis::Camera::ObliquePixelResolution().
|
inherited |
Return the off nadir angle in degrees.
Definition at line 2195 of file Camera.cpp.
References Isis::NaifStatus::CheckErrors(), Isis::Sensor::Coordinate(), Isis::Sensor::EmissionAngle(), Isis::Spice::instrumentPosition(), and Isis::PI.
|
inherited |
Returns the number of lines in the parent alphacube.
Definition at line 2806 of file Camera.cpp.
References Isis::AlphaCube::AlphaLines(), and Isis::Camera::p_alphaCube.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::CrismCamera::CrismCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::VimsGroundMap::Init(), Isis::VimsSkyMap::Init(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::MarciCamera::MarciCamera(), Isis::MiniRF::MiniRF(), Isis::VimsGroundMap::SetFocalPlane(), Isis::VimsSkyMap::SetFocalPlane(), Isis::VimsGroundMap::SetGround(), Isis::VimsSkyMap::SetSky(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::PushFrameCameraDetectorMap::TotalFramelets(), and Isis::VimsGroundMap::VimsGroundMap().
|
inherited |
Returns the number of samples in the parent alphacube.
Definition at line 2816 of file Camera.cpp.
References Isis::AlphaCube::AlphaSamples(), and Isis::Camera::p_alphaCube.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::VimsGroundMap::Init(), Isis::VimsSkyMap::Init(), Isis::VimsGroundMap::SetFocalPlane(), Isis::VimsSkyMap::SetFocalPlane(), Isis::VimsGroundMap::SetGround(), Isis::VimsSkyMap::SetSky(), and Isis::VimsGroundMap::VimsGroundMap().
|
virtualinherited |
Returns the phase angle in degrees.
This does not use the surface model.
Reimplemented in Isis::CSMCamera.
Definition at line 312 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::Sensor::Coordinate(), Isis::Spice::instrumentPosition(), Isis::Spice::m_uB, Isis::ShapeModel::phaseAngle(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::CameraStatistics::addStats(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Returns the pixel ifov offsets from center of pixel, which defaults to the (pixel pitch * summing mode ) / 2.
If an instrument has a non-square ifov, it must implement this method to return the offsets from the center of the pixel.
Reimplemented from Isis::Sensor.
Reimplemented in Isis::HayabusaNirsCamera, Isis::VimsCamera, and Isis::CSMCamera.
Definition at line 2755 of file Camera.cpp.
References Isis::Camera::DetectorMap(), and Isis::Camera::PixelPitch().
Referenced by Isis::PixelFOV::instantaneousFov().
|
inherited |
Returns the pixel pitch.
Definition at line 2742 of file Camera.cpp.
References Isis::Camera::p_pixelPitch.
Referenced by Isis::IsisBundleObservation::computeImagePartials(), Isis::IsisBundleObservation::computeObservationValue(), Isis::IsisBundleObservation::computePoint3DPartials(), Isis::NewHorizonsMvicTdiCameraDistortionMap::computeResidualDistortionCorrections(), Isis::IsisBundleObservation::computeRHSPartials(), Isis::IsisBundleObservation::computeTargetPartials(), Isis::CrismCamera::CrismCamera(), Isis::IdealCamera::IdealCamera(), Isis::Camera::LoadCache(), Isis::MiniRF::MiniRF(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::NewHorizonsMvicFrameCameraDistortionMap::NewHorizonsMvicFrameCameraDistortionMap(), Isis::NewHorizonsMvicTdiCameraDistortionMap::NewHorizonsMvicTdiCameraDistortionMap(), Isis::OsirisRexDistortionMap::OsirisRexDistortionMap(), Isis::Camera::PixelIfovOffsets(), Isis::HayabusaNirsCamera::PixelIfovOffsets(), Isis::ReseauDistortionMap::ReseauDistortionMap(), Isis::KaguyaMiCameraDistortionMap::SetDistortion(), Isis::JunoDistortionMap::SetDistortion(), Isis::MarciDistortionMap::SetFocalPlane(), Isis::JunoDistortionMap::SetFocalPlane(), Isis::MarciDistortionMap::SetUndistortedFocalPlane(), Isis::CameraDistortionMap::SetUndistortedFocalPlane(), and Isis::Hyb2OncDistortionMap::SetUndistortedFocalPlane().
|
virtualinherited |
Returns the pixel resolution at the current position in meters/pixel.
Definition at line 670 of file Camera.cpp.
References Isis::Camera::LineResolution(), Isis::Null, and Isis::Camera::SampleResolution().
Referenced by Isis::CameraStatistics::addStats(), Isis::Camera::ComputeAzimuth(), Isis::Camera::GroundRangeResolution(), Isis::InterestOperator::InterestByMeasure(), Isis::Camera::LoadCache(), Isis::ControlNetValidMeasure::MetersFromEdge(), Isis::MiniRF::MiniRF(), Isis::Camera::resolution(), Isis::UniversalGroundMap::Resolution(), Isis::Camera::ringRangeResolution(), Isis::MeasureTool::updateDist(), and Isis::AdvancedTrackTool::updateRow().
|
inherited |
Computes the RaDec range.
| minra | Minimum right ascension value |
| maxra | Maximum right ascension value |
| mindec | Minimum declination value |
| maxdec | Maximum declination value |
Definition at line 1707 of file Camera.cpp.
References Isis::Camera::Band(), Isis::Sensor::Declination(), Isis::Camera::IsBandIndependent(), Isis::Camera::Line(), Isis::Camera::p_bands, Isis::Camera::p_lines, Isis::Camera::p_maxdec, Isis::Camera::p_maxra, Isis::Camera::p_maxra180, Isis::Camera::p_mindec, Isis::Camera::p_minra, Isis::Camera::p_minra180, Isis::Camera::p_pointComputed, Isis::Camera::p_raDecRangeComputed, Isis::Camera::p_samples, Isis::Sensor::RightAscension(), Isis::Camera::Sample(), Isis::Camera::SetBand(), Isis::Camera::SetImage(), and Isis::Camera::SetRightAscensionDeclination().
|
inherited |
Returns the RaDec resolution.
Definition at line 1849 of file Camera.cpp.
References Isis::Camera::Band(), Isis::Sensor::Declination(), Isis::Camera::Line(), Isis::Camera::p_lines, Isis::Camera::p_pointComputed, Isis::Camera::p_samples, Isis::Sensor::RightAscension(), Isis::Camera::Sample(), Isis::Camera::SetBand(), and Isis::Camera::SetImage().
Referenced by Isis::Camera::CelestialNorthClockAngle().
|
inherited |
Returns the radii of the body in km.
The radii are obtained from the appropriate SPICE kernel for the body specified by TargetName in the Instrument group of the labels.
| r[] | Radii of the target in kilometers |
Definition at line 930 of file Spice.cpp.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::GroundRange(), Isis::VimsGroundMap::Init(), Isis::MiniRF::MiniRF(), Isis::ControlPointEditWidget::openReferenceRadius(), Isis::QnetTool::openReferenceRadius(), Isis::SunShadowTool::recalculateShadowHeight(), Isis::RadarGroundMap::SetFocalPlane(), Isis::CSMCamera::setTarget(), and Isis::AdvancedTrackTool::updateRow().
|
privateinherited |
Computes the image coordinate for the current universal ground point.
Definition at line 455 of file Camera.cpp.
References Isis::AlphaCube::BetaLine(), Isis::AlphaCube::BetaSample(), Isis::ShapeModel::clearSurfacePoint(), Isis::Sensor::Declination(), Isis::CameraFocalPlaneMap::DetectorLine(), Isis::CameraFocalPlaneMap::DetectorSample(), Isis::CameraDistortionMap::FocalPlaneX(), Isis::CameraGroundMap::FocalPlaneX(), Isis::CameraDistortionMap::FocalPlaneY(), Isis::CameraGroundMap::FocalPlaneY(), Isis::Projection::IsSky(), Isis::Sensor::LocalRadius(), Isis::Camera::p_alphaCube, Isis::Camera::p_childLine, Isis::Camera::p_childSample, Isis::Camera::p_detectorMap, Isis::Camera::p_distortionMap, Isis::Camera::p_focalPlaneMap, Isis::Camera::p_groundMap, Isis::Camera::p_ignoreProjection, Isis::Camera::p_pointComputed, Isis::Camera::p_projection, Isis::CameraDetectorMap::ParentLine(), Isis::CameraDetectorMap::ParentSample(), Isis::Projection::projectionType(), Isis::Sensor::RightAscension(), Isis::CameraDetectorMap::SetDetector(), Isis::CameraFocalPlaneMap::SetFocalPlane(), Isis::ShapeModel::setHasIntersection(), Isis::CameraDistortionMap::SetUndistortedFocalPlane(), Isis::Projection::SetUniversalGround(), Isis::Target::shape(), Isis::Spice::target(), Isis::Projection::Triaxial, Isis::Sensor::UniversalLatitude(), Isis::Sensor::UniversalLongitude(), Isis::Projection::WorldX(), and Isis::Projection::WorldY().
Referenced by Isis::Camera::SetGround(), and Isis::Camera::SetUniversalGround().
|
protectedinherited |
This should be used for reading ALL text naif kernel values.
This will read it from Naif if we're using naif/not attached kernels. If we have attached kernels and a NaifKeywords label object we will grab it from there instead. This allows us to not furnish kernels after spiceinit.
| key | The naif keyword,value name |
| type | The naif value's primitive type |
| index | The index into the naif keyword array to read |
Definition at line 1093 of file Spice.cpp.
Referenced by Isis::IdealCamera::IdealCamera().
|
inherited |
Returns the reference band.
Definition at line 2659 of file Camera.cpp.
References Isis::Camera::p_referenceBand.
Referenced by Isis::ThemisVisCamera::BandEphemerisTimeOffset(), and Isis::ThemisIrCamera::SetBand().
|
virtualinherited |
Returns the resolution of the camera.
Reimplemented from Isis::Sensor.
Definition at line 2720 of file Camera.cpp.
References Isis::Camera::PixelResolution().
|
virtualinherited |
Returns the right ascension angle (sky longitude).
Reimplemented in Isis::CSMCamera.
Definition at line 561 of file Sensor.cpp.
References Isis::Sensor::computeRaDec(), Isis::Sensor::m_newLookB, and Isis::Sensor::m_ra.
Referenced by Isis::Camera::CelestialNorthClockAngle(), Isis::VimsSkyMap::Init(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::Camera::RawFocalPlanetoImage(), and Isis::AdvancedTrackTool::updateRow().
|
inherited |
Analogous to the above Ground Range method.
Computes Range on the ring plane
| minRingRadius | The minimum ring radius |
| maxRingRadius | The maximum ring radius |
| minRingLongitude | The minimum ring longitude |
| maxRingLongitude | The maximum ring longitude |
| pvl | The pvl file used for ring range calculations |
Definition at line 1286 of file Camera.cpp.
References Isis::PvlObject::findGroup(), Isis::PvlContainer::hasKeyword(), Isis::Camera::p_maxRingLongitude, Isis::Camera::p_maxRingLongitude180, Isis::Camera::p_maxRingRadius, Isis::Camera::p_minRingLongitude, Isis::Camera::p_minRingLongitude180, Isis::Camera::p_minRingRadius, Isis::Camera::ringRangeResolution(), and Isis::PvlObject::Traverse.
|
privateinherited |
Analogous to above GroundRangeResolution method.
Computes the ring range and min/max resolution
Definition at line 982 of file Camera.cpp.
References Isis::Camera::Band(), Isis::Angle::Degrees, Isis::Camera::IsBandIndependent(), Isis::Camera::Line(), Isis::Sensor::LocalRadius(), Isis::Distance::Meters, Isis::Distance::meters(), Isis::Camera::p_bands, Isis::Camera::p_lines, Isis::Camera::p_maxres, Isis::Camera::p_maxRingLongitude, Isis::Camera::p_maxRingLongitude180, Isis::Camera::p_maxRingRadius, Isis::Camera::p_minres, Isis::Camera::p_minRingLongitude, Isis::Camera::p_minRingLongitude180, Isis::Camera::p_minRingRadius, Isis::Camera::p_pointComputed, Isis::Camera::p_ringRangeComputed, Isis::Camera::p_samples, Isis::Camera::PixelResolution(), Isis::Camera::Sample(), Isis::Camera::SetBand(), Isis::Camera::SetGround(), Isis::Camera::SetImage(), Isis::Sensor::UniversalLongitude(), and Isis::IException::Unknown.
Referenced by Isis::Camera::basicRingMapping(), and Isis::Camera::ringRange().
|
virtualinherited |
Returns the current sample number.
Definition at line 2690 of file Camera.cpp.
References Isis::Camera::p_childSample.
Referenced by Isis::QnetTool::addMeasure(), Isis::Camera::CelestialNorthClockAngle(), Isis::Camera::ComputeAzimuth(), Isis::ControlPoint::ComputeResiduals_Millimeters(), Isis::CsmBundleObservation::computeRHSPartials(), Isis::ControlPointEditWidget::createControlPoint(), Isis::QnetTool::createFixedPoint(), Isis::ProjectionFactory::CreateForCube(), Isis::QnetTool::createPoint(), Isis::MosaicSceneItem::drawImage(), Isis::InterestOperator::FindCnetRef(), Isis::ImagePolygon::FixPolePoly(), Isis::SmtkMatcher::getLineSample(), Isis::Camera::GetLocalNormal(), Isis::Camera::GroundRangeResolution(), Isis::Camera::InCube(), Isis::Chip::Load(), Isis::CSMCamera::parentSample(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::Camera::ringRangeResolution(), and Isis::UniversalGroundMap::Sample().
|
virtualinherited |
Returns the sample resolution at the current position in meters.
Reimplemented in Isis::CSMCamera.
Definition at line 629 of file Camera.cpp.
References Isis::Camera::DetectorResolution(), Isis::Camera::p_detectorMap, and Isis::CameraDetectorMap::SampleScaleFactor().
Referenced by Isis::CameraStatistics::addStats(), and Isis::Camera::PixelResolution().
|
inherited |
Returns the number of samples in the image.
Definition at line 2776 of file Camera.cpp.
References Isis::Camera::p_samples.
Referenced by Isis::ProjectionFactory::CreateForCube(), Isis::Camera::InCube(), Isis::SmtkMatcher::inCube(), Isis::CameraStatistics::init(), Isis::MiniRF::MiniRF(), Isis::NewHorizonsMvicFrameCameraDistortionMap::NewHorizonsMvicFrameCameraDistortionMap(), Isis::NewHorizonsMvicTdiCameraDistortionMap::NewHorizonsMvicTdiCameraDistortionMap(), and Isis::ProjectionFactory::RingsCreateForCube().
|
virtualinherited |
Virtual method that sets the band number.
| band | Band Number |
Reimplemented in Isis::NewHorizonsMvicFrameCamera, Isis::NewHorizonsLeisaCamera, Isis::CrismCamera, Isis::ThemisVisCamera, Isis::ThemisIrCamera, Isis::MarciCamera, and Isis::LroWideAngleCamera.
Definition at line 2680 of file Camera.cpp.
References Isis::Camera::p_childBand.
Referenced by Isis::ProjectionFactory::CreateForCube(), Isis::Camera::GroundRangeResolution(), Isis::CameraStatistics::init(), Isis::Camera::LoadCache(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::Camera::ringRangeResolution(), Isis::ProjectionFactory::RingsCreateForCube(), Isis::UniversalGroundMap::SetBand(), Isis::LroWideAngleCamera::SetBand(), Isis::MarciCamera::SetBand(), Isis::ThemisVisCamera::SetBand(), Isis::NewHorizonsLeisaCamera::SetBand(), Isis::NewHorizonsMvicFrameCamera::SetBand(), Isis::Camera::StartEndEphemerisTimes(), Isis::CubeViewport::viewGray(), and Isis::CubeViewport::viewRGB().
|
inherited |
Sets the Detector Map.
This object will take ownership of the detector map pointer.
| *map | Pointer to a CameraDetectorMap object |
Definition at line 2372 of file Camera.cpp.
References Isis::Camera::p_detectorMap.
Referenced by Isis::CameraDetectorMap::CameraDetectorMap().
|
inherited |
Sets the Distortion Map.
This object will take ownership of the distortion map pointer.
| *map | Pointer to a CameraDistortionMap object |
Definition at line 2342 of file Camera.cpp.
References Isis::Camera::p_distortionMap.
Referenced by Isis::CameraDistortionMap::CameraDistortionMap(), and Isis::TgoCassisCamera::TgoCassisCamera().
|
protectedinherited |
Reads the focal length from the instrument kernel.
Definition at line 1411 of file Camera.cpp.
References Isis::Spice::getDouble(), Isis::Spice::naifIkCode(), and Isis::toString().
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IdealCamera::IdealCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::LroWideAngleCamera::SetBand(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
protectedinherited |
Sets the focal length.
| v | Focal Length |
Definition at line 3014 of file Camera.cpp.
References Isis::Camera::p_focalLength.
Referenced by Isis::RadarSlantRangeMap::SetFocalPlane(), and Isis::RadarGroundMap::SetGround().
|
inherited |
Sets the Focal Plane Map.
This object will take ownership of the focal plane map pointer.
| *map | Pointer to a CameraFocalPlaneMap object |
Definition at line 2357 of file Camera.cpp.
References Isis::Camera::p_focalPlaneMap.
Referenced by Isis::CameraFocalPlaneMap::CameraFocalPlaneMap(), and Isis::CameraFocalPlaneMap::Init().
|
protectedinherited |
This method sets the best geometric tiling size for projecting from this camera model.
This is used by cam2map/ProcessRubberSheet. When cubes are projected, an attempt is made to use linear equations to take large, square chunks of data at a time to cull the amount of SetUniversalGround(...) calls necessary to project a cube. If the chunk of data fails to be linear, then it will be split up into 4 corners and each of the new chunks (corners) are reconsidered up until endSize is reached - the endsize size will be considered, it is inclusive. The startSize must be a power of 2 greater than 2, and the endSize must be a power of 2 equal to or less than the start size but greater than 2. If both the startSize and endSize are set to 2 then no geometric tiling will be enabled.
| startSize | The tile size to start with; default 128 |
| endSize | The tile size to give up at; default 8 |
Definition at line 2554 of file Camera.cpp.
References Isis::Camera::p_geometricTilingEndSize, Isis::Camera::p_geometricTilingStartSize, and Isis::IException::Programmer.
Referenced by Isis::Camera::Camera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), and Isis::MarciCamera::MarciCamera().
|
virtualinherited |
Sets the lat/lon/radius values to get the sample/line values.
| surfacePt | The point used for calculation |
Reimplemented in Isis::CSMCamera.
Definition at line 431 of file Camera.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Camera::p_groundMap, Isis::Camera::RawFocalPlanetoImage(), Isis::CameraGroundMap::SetGround(), Isis::Target::shape(), and Isis::Spice::target().
|
inherited |
This overloaded method has the opposite function as SetLookDirection.
Instead of computing a point on the target, a point is set and the look direction is computed. Other methods such as lat/lon, phase, incidence, etc. can be used if this method returns a true.
| backCheck | If true this method will check the lat/lon point to see if it falls on the backside of the target (or beyond the horizon). If false this test will not occur. Defaults to true. |
Definition at line 443 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::ShapeModel::clearSurfacePoint(), Isis::Sensor::Coordinate(), Isis::Spice::instrumentPosition(), Isis::Sensor::SetGroundLocal(), Isis::Target::shape(), and Isis::Spice::target().
Sets the lat/lon values to get the sample/line values.
Reimplemented in Isis::CSMCamera.
Definition at line 401 of file Camera.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Angle::Degrees, Isis::Angle::degrees(), Isis::Distance::isValid(), Isis::Distance::Kilometers, Isis::Sensor::LocalRadius(), Isis::ShapeModel::name(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::ControlPoint::ComputeResiduals_Millimeters(), Isis::CsmBundleObservation::computeRHSPartials(), Isis::Camera::GroundRangeResolution(), Isis::Camera::ringRangeResolution(), Isis::UniversalGroundMap::SetGround(), Isis::Camera::SetImageMapProjection(), and Isis::UniversalGroundMap::SetUnboundGround().
|
privateinherited |
Computes look vector.
This method handles the common functions for the overloaded SetUniversalGround methods.
Instead of computing a point on the target, a point is set (lat,lon,radius) and the look direction is computed.
| backCheck | If true this method will check the lat/lon point to see if it falls on the backside of the target (or beyond the horizon). If false this test will not occur. Defaults to true. |
Definition at line 475 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::ShapeModel::clearSurfacePoint(), Isis::Sensor::Coordinate(), Isis::ShapeModel::hasIntersection(), Isis::Spice::instrumentPosition(), Isis::ShapeModel::isVisibleFrom(), Isis::Displacement::kilometers(), Isis::Sensor::lookDirectionBodyFixed(), Isis::Sensor::m_lookB, Isis::Sensor::m_newLookB, Isis::SpiceRotation::ReferenceVector(), Isis::ShapeModel::setHasIntersection(), Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::Sensor::SetGround(), and Isis::Sensor::SetUniversalGround().
|
inherited |
Sets the Ground Map.
This object will take ownership of the ground map pointer.
| *map | Pointer to a CameraGroundMap object |
Definition at line 2387 of file Camera.cpp.
References Isis::Camera::p_groundMap.
Referenced by Isis::CameraGroundMap::CameraGroundMap().
|
virtualinherited |
Sets the sample/line values of the image to get the lat/lon values.
| sample | Sample coordinate of the cube. |
| line | Line coordinate of the cube. |
Reimplemented in Isis::CSMCamera.
Definition at line 154 of file Camera.cpp.
References Isis::AlphaCube::AlphaLine(), Isis::AlphaCube::AlphaSample(), Isis::ShapeModel::clearSurfacePoint(), Isis::CameraDetectorMap::DetectorLine(), Isis::CameraDetectorMap::DetectorSample(), Isis::CameraFocalPlaneMap::FocalPlaneX(), Isis::CameraFocalPlaneMap::FocalPlaneY(), Isis::Projection::IsSky(), Isis::Camera::p_alphaCube, Isis::Camera::p_childLine, Isis::Camera::p_childSample, Isis::Camera::p_detectorMap, Isis::Camera::p_distortionMap, Isis::Camera::p_focalPlaneMap, Isis::Camera::p_groundMap, Isis::Camera::p_ignoreProjection, Isis::Camera::p_pointComputed, Isis::Camera::p_projection, Isis::CameraFocalPlaneMap::SetDetector(), Isis::CameraGroundMap::SetFocalPlane(), Isis::CameraDistortionMap::SetFocalPlane(), Isis::Camera::SetImageMapProjection(), Isis::Camera::SetImageSkyMapProjection(), Isis::CameraDetectorMap::SetParent(), Isis::Target::shape(), Isis::Spice::target(), Isis::CameraDistortionMap::UndistortedFocalPlaneX(), Isis::CameraDistortionMap::UndistortedFocalPlaneY(), and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
Referenced by Isis::QnetTool::addMeasure(), Isis::CameraStatistics::addStats(), Isis::StereoTool::calculateElevation(), Isis::Camera::CelestialNorthClockAngle(), Isis::ControlPoint::ComputeApriori(), Isis::Camera::ComputeAzimuth(), Isis::BundleAdjust::computePartials(), Isis::ControlPoint::ComputeResiduals(), Isis::ControlPoint::ComputeResiduals_Millimeters(), Isis::ProjectionFactory::CreateForCube(), Isis::ControlPointEditWidget::createTemporaryGroundMeasure(), Isis::ControlNetFilter::CubeDistanceFilter(), Isis::QnetSetAprioriDialog::fillAverageAprioriLineEdits(), Isis::QnetSetAprioriDialog::fillReferenceAprioriLineEdits(), Isis::QnetCubeDistanceFilter::filter(), Isis::QnetPointDistanceFilter::filter(), Isis::InterestOperator::FindCnetRef(), Isis::QnetTool::findPointLocation(), Isis::SmtkMatcher::getLatLon(), Isis::Camera::GetLocalNormal(), Isis::Camera::GroundRangeResolution(), Isis::VimsGroundMap::Init(), Isis::VimsSkyMap::Init(), Isis::InterestOperator::InterestByMeasure(), Isis::Cube::latLonRange(), Isis::PixelFOV::latLonVertices(), Isis::Chip::Load(), Isis::Camera::LoadCache(), Isis::ControlNetValidMeasure::MetersFromEdge(), Isis::SunShadowTool::mouseButtonPress(), Isis::ControlNetFilter::PointDistanceFilter(), Isis::ControlNetFilter::PointLatLonFilter(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::SunShadowTool::recalculateShadowHeight(), Isis::Camera::ringRangeResolution(), Isis::ProjectionFactory::RingsCreateForCube(), Isis::VimsGroundMap::SetGround(), Isis::UniversalGroundMap::SetImage(), Isis::ControlPointEditWidget::setShapesForPoint(), Isis::VimsSkyMap::SetSky(), Isis::Camera::StartEndEphemerisTimes(), Isis::MeasureTool::updateDist(), Isis::TrackTool::updateLabels(), Isis::AdvancedTrackTool::updateRow(), and Isis::VimsCamera::VimsCamera().
|
virtualinherited |
Sets the sample/line values of the image to get the lat/lon values with a time offset of deltaT.
Warning: The deltaT parameter was added specifically for pixel2map to use for the Dawn VIR camera. It is used to adjust the pointing to its location at specific times like the times at the beginning, middle, and end of exposure for a specific pixel, when the correct deltaT can be determined to achieve these results.
Do not use this verstion of SetImage with a deltaT unless you understand exactly what this does.
| sample | Sample coordinate of the cube. |
| line | Line coordinate of the cube. |
| deltaT | seconds from the center exposure time |
Definition at line 228 of file Camera.cpp.
References Isis::AlphaCube::AlphaLine(), Isis::AlphaCube::AlphaSample(), Isis::ShapeModel::clearSurfacePoint(), Isis::CameraDetectorMap::DetectorLine(), Isis::CameraDetectorMap::DetectorSample(), Isis::CameraFocalPlaneMap::FocalPlaneX(), Isis::CameraFocalPlaneMap::FocalPlaneY(), Isis::Projection::IsSky(), Isis::Camera::p_alphaCube, Isis::Camera::p_childLine, Isis::Camera::p_childSample, Isis::Camera::p_detectorMap, Isis::Camera::p_distortionMap, Isis::Camera::p_focalPlaneMap, Isis::Camera::p_groundMap, Isis::Camera::p_ignoreProjection, Isis::Camera::p_pointComputed, Isis::Camera::p_projection, Isis::CameraFocalPlaneMap::SetDetector(), Isis::CameraGroundMap::SetFocalPlane(), Isis::CameraDistortionMap::SetFocalPlane(), Isis::Camera::SetImageMapProjection(), Isis::Camera::SetImageSkyMapProjection(), Isis::CameraDetectorMap::SetParent(), Isis::Target::shape(), Isis::Spice::target(), Isis::CameraDistortionMap::UndistortedFocalPlaneX(), Isis::CameraDistortionMap::UndistortedFocalPlaneY(), and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
|
privateinherited |
Sets the sample/line values of the image to get the lat/lon values for a Map Projected image.
| sample | Sample coordinate of the cube |
| line | Line coordinate of the cube |
| shape | shape of the target |
Definition at line 294 of file Camera.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Angle::Degrees, Isis::Distance::isValid(), Isis::Sensor::LocalRadius(), Isis::Distance::Meters, Isis::ShapeModel::name(), Isis::Camera::p_childLine, Isis::Camera::p_childSample, Isis::Camera::p_projection, Isis::Camera::SetGround(), Isis::ShapeModel::setHasIntersection(), Isis::Projection::SetWorld(), Isis::TProjection::UniversalLatitude(), Isis::TProjection::UniversalLongitude(), Isis::RingPlaneProjection::UniversalRingLongitude(), and Isis::RingPlaneProjection::UniversalRingRadius().
Referenced by Isis::Camera::SetImage().
|
privateinherited |
Sets the sample/line values of the image to get the lat/lon values for a Skymap Projected image.
| sample | Sample coordinate of the cube |
| line | Line coordinate of the cube |
| shape | shape of the target |
Definition at line 355 of file Camera.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Sensor::HasSurfaceIntersection(), Isis::TProjection::Longitude(), Isis::Camera::p_childLine, Isis::Camera::p_childSample, Isis::Camera::p_projection, Isis::Camera::SetRightAscensionDeclination(), Isis::Projection::SetWorld(), and Isis::TProjection::UniversalLatitude().
Referenced by Isis::Camera::SetImage().
|
inherited |
Sets the look direction of the spacecraft.
This routine will then attempt to intersect the look direction with the target. If successful you can utilize the methods which return the lat/lon, phase, incidence, etc. This routine returns false if the look direction does not intersect the target.
| v[] | A look vector in camera coordinates. For example, (0,0,1) is usually the look direction out of the boresight of a camera. |
Definition at line 141 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::Sensor::Coordinate(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::SpiceRotation::J2000Vector(), Isis::Sensor::m_lookB, Isis::Sensor::m_newLookB, Isis::SpiceRotation::ReferenceVector(), Isis::ShapeModel::setHasIntersection(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::PixelFOV::instantaneousFov(), Isis::CameraSkyMap::SetFocalPlane(), Isis::VimsGroundMap::SetFocalPlane(), Isis::VimsSkyMap::SetFocalPlane(), and Isis::Sensor::SetRightAscensionDeclination().
|
protectedinherited |
Reads the Pixel Pitch from the instrument kernel.
Definition at line 1418 of file Camera.cpp.
References Isis::Spice::getDouble(), Isis::Spice::naifIkCode(), and Isis::toString().
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IdealCamera::IdealCamera(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
protectedinherited |
Sets the pixel pitch.
| v | Pixel Pitch |
Definition at line 3023 of file Camera.cpp.
References Isis::Camera::p_pixelPitch.
|
inherited |
Sets the right ascension declination.
| ra | Right ascension value |
| dec | Declination value |
Definition at line 1435 of file Camera.cpp.
References Isis::AlphaCube::BetaLine(), Isis::AlphaCube::BetaSample(), Isis::CameraFocalPlaneMap::DetectorLine(), Isis::CameraFocalPlaneMap::DetectorSample(), Isis::CameraDistortionMap::FocalPlaneX(), Isis::CameraSkyMap::FocalPlaneX(), Isis::CameraDistortionMap::FocalPlaneY(), Isis::CameraSkyMap::FocalPlaneY(), Isis::Projection::IsSky(), Isis::Camera::p_alphaCube, Isis::Camera::p_childLine, Isis::Camera::p_childSample, Isis::Camera::p_detectorMap, Isis::Camera::p_distortionMap, Isis::Camera::p_focalPlaneMap, Isis::Camera::p_ignoreProjection, Isis::Camera::p_pointComputed, Isis::Camera::p_projection, Isis::Camera::p_skyMap, Isis::CameraDetectorMap::ParentLine(), Isis::CameraDetectorMap::ParentSample(), Isis::CameraDetectorMap::SetDetector(), Isis::CameraFocalPlaneMap::SetFocalPlane(), Isis::CameraSkyMap::SetSky(), Isis::CameraDistortionMap::SetUndistortedFocalPlane(), Isis::Projection::SetUniversalGround(), Isis::Spice::target(), Isis::Sensor::UniversalLatitude(), Isis::Sensor::UniversalLongitude(), Isis::Projection::WorldX(), and Isis::Projection::WorldY().
Referenced by Isis::Camera::CelestialNorthClockAngle(), Isis::Camera::RaDecRange(), and Isis::Camera::SetImageSkyMapProjection().
|
inherited |
Sets the Sky Map.
This object will take ownership of the sky map pointer.
| *map | Pointer to a CameraSkyMap object |
Definition at line 2401 of file Camera.cpp.
References Isis::Camera::p_skyMap.
Referenced by Isis::CameraSkyMap::CameraSkyMap().
|
virtualinherited |
By setting the time you essential set the position of the spacecraft and body as indicated in the class Spice.
However, after this is invoked there will be no intersection point until SetLookDirection or SetUniversalGround is invoked. (Read NAIF documentation for a detailed description of ephemeris time.)
| time | Ephemeris time. |
Reimplemented from Isis::Spice.
Definition at line 97 of file Sensor.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Spice::setTime(), Isis::Target::shape(), Isis::Spice::target(), and Isis::Spice::time().
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::IdealCamera::IdealCamera(), Isis::VimsGroundMap::Init(), Isis::VimsSkyMap::Init(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::Camera::LoadCache(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::ThemisVisCamera::SetBand(), Isis::NewHorizonsMvicFrameCamera::SetBand(), Isis::VimsGroundMap::SetFocalPlane(), Isis::VimsSkyMap::SetFocalPlane(), Isis::PushFrameCameraDetectorMap::SetFramelet(), Isis::RadarPulseMap::SetParent(), Isis::CameraDetectorMap::SetParent(), Isis::LineScanCameraDetectorMap::SetParent(), Isis::RollingShutterCameraDetectorMap::SetParent(), Isis::VariableLineScanCameraDetectorMap::SetParent(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
virtualinherited |
Sets the lat/lon values to get the sample/line values.
Reimplemented in Isis::CSMCamera.
Definition at line 380 of file Camera.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Angle::Degrees, Isis::Camera::p_groundMap, Isis::Camera::RawFocalPlanetoImage(), Isis::CameraGroundMap::SetGround(), Isis::Target::shape(), and Isis::Spice::target().
Referenced by Isis::QnetTool::addMeasure(), Isis::Camera::ComputeAzimuth(), Isis::ControlPointEditWidget::createControlPoint(), Isis::QnetTool::createFixedPoint(), Isis::ProjectionFactory::CreateForCube(), Isis::QnetTool::createPoint(), Isis::InterestOperator::FindCnetRef(), Isis::SmtkMatcher::getLineSample(), Isis::Chip::Load(), and Isis::UniversalGroundMap::SetUniversalGround().
|
inherited |
This is the opposite routine for SetLookDirection.
Instead of computing a point on the target, a point is set and the look direction is computed. Other methods such as lat/lon, phase, incidence, etc. can be used if this method returns a true.
| latitude | Planetocentric latitude. |
| longitude | Positive east longitude. |
| backCheck | If true this method will check the lat/lon point to see if it falls on the backside of the target (or beyond the horizon). If false this test will not occur. Defaults to true. |
Definition at line 359 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::ShapeModel::clearSurfacePoint(), Isis::Sensor::Coordinate(), Isis::Angle::Degrees, Isis::Spice::instrumentPosition(), Isis::Sensor::SetGroundLocal(), Isis::Target::shape(), and Isis::Spice::target().
|
virtualinherited |
Sets the lat/lon/radius values to get the sample/line values.
| latitude | Latitude coordinate of the cube |
| longitude | Longitude coordinate of the cube |
| radius | Radius coordinate of the cube |
Reimplemented in Isis::CSMCamera.
Definition at line 542 of file Camera.cpp.
References Isis::ShapeModel::clearSurfacePoint(), Isis::Angle::Degrees, Isis::Distance::Meters, Isis::Camera::p_groundMap, Isis::Camera::RawFocalPlanetoImage(), Isis::CameraGroundMap::SetGround(), Isis::Target::shape(), and Isis::Spice::target().
|
inherited |
This overloaded method has the opposite function as SetLookDirection.
Instead of computing a point on the target, a point is set and the look direction is computed. Other methods such as lat/lon, phase, incidence, etc. can be used if this method returns a true.
| latitude | Planetocentric latitude in degrees. |
| longitude | Positive east longitude in degrees. |
| radius | Radius in meters. |
| backCheck | If true this method will check the lat/lon point to see if it falls on the backside of the target (or beyond the horizon). If false this test will not occur. Defaults to true. |
Definition at line 401 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::ShapeModel::clearSurfacePoint(), Isis::Sensor::Coordinate(), Isis::Angle::Degrees, Isis::Spice::instrumentPosition(), Isis::Distance::Meters, Isis::Sensor::SetGroundLocal(), Isis::Target::shape(), and Isis::Spice::target().
|
virtual |
Returns the shutter open and close times.
The user should pass in the ExposureDuration keyword value, converted from milliseconds to seconds, and the StartTime keyword value, converted to ephemeris time. The StartTime keyword value from the labels represents the time at the start of the observation, as noted in the Clementine EDR image SIS. This method uses the FramingCamera class implementation, returning the given time value as the shutter open and the sum of the time value and exposure duration as the shutter close.
| exposureDuration | ExposureDuration keyword value from the labels, converted to seconds. |
| time | The StartTime keyword value from the labels, converted to ephemeris time. |
Implements Isis::FramingCamera.
Definition at line 139 of file NirCamera.cpp.
References Isis::Camera::exposureDuration(), Isis::FramingCamera::ShutterOpenCloseTimes(), and Isis::Spice::time().
Referenced by NirCamera().
|
inherited |
Returns a pointer to the CameraSkyMap object.
Definition at line 2866 of file Camera.cpp.
References Isis::Camera::p_skyMap.
Referenced by Isis::LineScanCamera::SkyMap(), and Isis::VimsCamera::VimsCamera().
|
virtualinherited |
Return the distance between the spacecraft and surface point in kmv.
Reimplemented in Isis::CSMCamera.
Definition at line 637 of file Sensor.cpp.
References Isis::Spice::bodyRotation(), Isis::Sensor::Coordinate(), Isis::Spice::instrumentPosition(), Isis::Displacement::kilometers(), Isis::SpiceRotation::ReferenceVector(), Isis::Target::shape(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
Referenced by Isis::PushFrameCameraGroundMap::FindSpacecraftDistance(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Returns the distance between the sun and surface point in AU.
Reimplemented in Isis::CSMCamera.
Definition at line 677 of file Sensor.cpp.
References Isis::Displacement::kilometers(), Isis::Target::shape(), Isis::Spice::sunPosition(), Isis::ShapeModel::surfaceIntersection(), and Isis::Spice::target().
|
virtualinherited |
Returns the solar longitude.
Definition at line 1509 of file Spice.cpp.
Referenced by Isis::AdvancedTrackTool::updateRow().
|
inherited |
Returns the distance from the spacecraft to the subspacecraft point in km.
It uses the ellipsoid, not the shape model.
Definition at line 701 of file Sensor.cpp.
References Isis::Spice::instrumentPosition(), Isis::Distance::kilometers(), Isis::Sensor::LocalRadius(), Isis::PI, and Isis::Spice::subSpacecraftPoint().
Referenced by Isis::CrismCamera::CrismCamera(), Isis::Camera::LoadCache(), and Isis::MiniRF::MiniRF().
|
inherited |
Return the Spacecraft Azimuth.
Definition at line 1934 of file Camera.cpp.
References Isis::Camera::ComputeAzimuth(), and Isis::Spice::subSpacecraftPoint().
Referenced by Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
This method returns the full spacecraft name.
Implements Isis::Sensor.
Reimplemented in Isis::IdealCamera.
Definition at line 2906 of file Camera.cpp.
References Isis::Camera::m_spacecraftNameLong.
Referenced by Isis::GuiCamera::GuiCamera().
|
virtualinherited |
This method returns the shortened spacecraft name.
Implements Isis::Sensor.
Reimplemented in Isis::IdealCamera.
Definition at line 2916 of file Camera.cpp.
References Isis::Camera::m_spacecraftNameShort.
Referenced by Isis::GuiCamera::GuiCamera().
|
inherited |
Sets the vector between the spacecraft and surface point in body-fixed.
| scSurfaceVector | The direction vector from the observer to the surface intersection. |
Definition at line 625 of file Sensor.cpp.
References Isis::Sensor::m_lookB.
|
virtualinherited |
Provides the center of motion body for SPK NAIF kernel.
This virtual method may need to be implemented in each camera model providing the NAIF integer code for the center of motion of the object identified by the SpkTargetId() code. This is typically the targeted body for a particular image observation, but may be unique depending upon the design of the SPK mission kernels.
This value can be easily determined by using the NAIF spacit application that sumarizes binary kernels on the SPK kernel used for a particular instrument on a spacecraft. spacit will additionally require a leap seconds kernel (LSK). For example, the output of the MESSENGER SPK camera supporting the MDIS camera below indicates it is Venus.
The SpkCenterId value is found in the "Center Body" entry (2). The center of motion is most likely the targeted body for the image and this is provided by the naifBodyCode() method (in the Spice class). If this is not consistently the case for a particular mission, then camera models will need to reimplement this method.
Reimplemented in Isis::VimsCamera, Isis::IssWACamera, Isis::IssNACamera, Isis::IdealCamera, and Isis::CSMCamera.
Definition at line 3005 of file Camera.cpp.
References Isis::Spice::naifBodyCode().
|
inlinevirtual |
|
virtualinherited |
Provides target code for instruments SPK NAIF kernel.
This virtual method may need to be implemented in each camera model providing the target NAIF ID code found in the mission SPK kernel. This is typically the spacecraft ID code.
This value can be easily determined by using the NAIF spacit application that sumarizes binary kernels on the SPK kernel used for a particular instrument on a spacecraft. spacit will additionally require a leap seconds kernel (LSK). For example, the output of the MESSENGER SPK camera supporting the MDIS camera below indicates it is indeed the MESSENGER spacecraft:
The SpkTargetId value is found in the "Target Body" entry (-236).
For most cases, this is the NAIF SPK code returned by the naifSpkCode() method (in the Spice class). Some instrument camera models may need to override this method if this is not case.
Reimplemented in Isis::VoyagerCamera, Isis::VikingCamera, Isis::TgoCassisCamera, Isis::MdisCamera, Isis::MiniRF, Isis::JunoCamera, Isis::IdealCamera, and Isis::ApolloMetricCamera.
Definition at line 2963 of file Camera.cpp.
References Isis::Spice::naifSpkCode().
|
inherited |
Calculates the start and end ephemeris times.
These times are found by looping through the bands and finding the ephemeris times for the upper left and bottom right pixels in the image. The start time (shutter open time) is the minimum value of those ephemeris times. The end time (shutter close time) is the maximum value of those ephemeris times. This method must be called before a call to the Spice::createCache() method. It is called in the LoadCache() method.
| iException::Programmer | - "Unable to find time range for the spice kernels." |
Definition at line 2479 of file Camera.cpp.
References Isis::Camera::Bands(), Isis::AlphaCube::BetaLines(), Isis::AlphaCube::BetaSamples(), Isis::iTime::Et(), Isis::Camera::p_alphaCube, Isis::IException::Programmer, Isis::Camera::SetBand(), Isis::Camera::SetImage(), and Isis::Spice::time().
Referenced by Isis::Camera::LoadCache().
|
virtualinherited |
Returns the sub-solar latitude/longitude in universal coordinates (0-360 positive east, ocentric)
| lat | Sub-solar latitude |
| lon | Sub-solar longitude |
| Isis::IException::Programmer | - "You must call SetTime first." |
Reimplemented in Isis::CSMCamera.
Definition at line 1329 of file Spice.cpp.
References Isis::PI.
Referenced by Isis::Sensor::LocalSolarTime(), and Isis::Camera::SunAzimuth().
|
virtualinherited |
Returns the sub-spacecraft latitude/longitude in universal coordinates (0-360 positive east, ocentric)
| lat | Sub-spacecraft latitude |
| lon | Sub-spacecraft longitude |
| Isis::IException::Programmer | - "You must call SetTime first." |
Reimplemented in Isis::CSMCamera.
Definition at line 1278 of file Spice.cpp.
References Isis::PI.
Referenced by Isis::Camera::GroundRangeResolution(), Isis::Sensor::SpacecraftAltitude(), and Isis::Camera::SpacecraftAzimuth().
|
inherited |
Returns the Sun Azimuth.
Definition at line 1920 of file Camera.cpp.
References Isis::Camera::ComputeAzimuth(), and Isis::Spice::subSolarPoint().
Referenced by Isis::SunShadowTool::mouseButtonPress(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Accessor method for the sun position.
Reimplemented in Isis::CSMCamera.
Definition at line 1589 of file Spice.cpp.
Referenced by Isis::Sensor::SolarDistance().
|
virtualinherited |
Fills the input vector with sun position information, in either body-fixed or J2000 reference frame and km units.
| p[] | Sun position |
Reimplemented in Isis::CSMCamera.
Definition at line 902 of file Spice.cpp.
Referenced by Isis::SunShadowTool::recalculateShadowHeight().
|
virtualinherited |
Returns a pointer to the target object.
Definition at line 1368 of file Spice.cpp.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::basicRingMapping(), Isis::Sensor::Coordinate(), Isis::CSMCamera::EmissionAngle(), Isis::Sensor::EmissionAngle(), Isis::FeatureNomenclatureTool::findMissingNomenclature(), Isis::Sensor::GetLatitude(), Isis::Camera::GetLocalNormal(), Isis::Sensor::GetLongitude(), Isis::Sensor::GetSurfacePoint(), Isis::UniversalGroundMap::GroundRange(), Isis::Camera::GroundRangeResolution(), Isis::Sensor::HasSurfaceIntersection(), Isis::Sensor::IgnoreElevationModel(), Isis::ImportImagesWorkOrder::importConfirmedImages(), Isis::CSMCamera::IncidenceAngle(), Isis::Sensor::IncidenceAngle(), Isis::Camera::LoadCache(), Isis::Sensor::LocalRadius(), Isis::Camera::NorthAzimuth(), Isis::CSMCamera::PhaseAngle(), Isis::Sensor::PhaseAngle(), Isis::Camera::RawFocalPlanetoImage(), Isis::VimsGroundMap::SetGround(), Isis::RadarGroundMap::SetGround(), Isis::Sensor::SetGround(), Isis::Camera::SetGround(), Isis::CSMCamera::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::Camera::SetImage(), Isis::CSMCamera::SetImage(), Isis::Sensor::SetLookDirection(), Isis::Camera::SetRightAscensionDeclination(), Isis::CSMCamera::setTarget(), Isis::Sensor::setTime(), Isis::Camera::SetUniversalGround(), Isis::Sensor::SetUniversalGround(), Isis::Sensor::SlantDistance(), Isis::Sensor::SolarDistance(), Isis::TrackTool::updateLabels(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Calculates and returns the distance from the spacecraft to the target center.
Reimplemented in Isis::CSMCamera.
|
inherited |
Returns the QString name of the target.
Definition at line 1378 of file Spice.cpp.
References Isis::Target::name().
|
inherited |
Returns the ephemeris time in seconds which was used to obtain the spacecraft and sun positions.
| IException::Programmer | "Unable to retrieve the time Spice::setTime must be called first." |
Definition at line 884 of file Spice.cpp.
Referenced by Isis::RadarSlantRangeMap::ComputeA(), Isis::HiresCamera::HiresCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LwirCamera::LwirCamera(), Isis::NewHorizonsMvicFrameCamera::SetBand(), Isis::LineScanCameraDetectorMap::SetDetector(), Isis::RadarPulseMap::SetDetector(), Isis::VariableLineScanCameraDetectorMap::SetDetector(), Isis::RadarSlantRangeMap::SetFocalPlane(), Isis::CameraDetectorMap::SetParent(), Isis::RollingShutterCameraDetectorMap::SetParent(), Isis::Sensor::setTime(), Isis::RadarSlantRangeMap::SetUndistortedFocalPlane(), Isis::ApolloMetricCamera::ShutterOpenCloseTimes(), Isis::IssNACamera::ShutterOpenCloseTimes(), Isis::IssWACamera::ShutterOpenCloseTimes(), Isis::HiresCamera::ShutterOpenCloseTimes(), Isis::LwirCamera::ShutterOpenCloseTimes(), ShutterOpenCloseTimes(), Isis::UvvisCamera::ShutterOpenCloseTimes(), Isis::ClipperWacFcCamera::ShutterOpenCloseTimes(), Isis::DawnFcCamera::ShutterOpenCloseTimes(), Isis::SsiCamera::ShutterOpenCloseTimes(), Isis::HayabusaAmicaCamera::ShutterOpenCloseTimes(), Isis::HayabusaNirsCamera::ShutterOpenCloseTimes(), Isis::Hyb2OncCamera::ShutterOpenCloseTimes(), Isis::JunoCamera::ShutterOpenCloseTimes(), Isis::LoHighCamera::ShutterOpenCloseTimes(), Isis::LoMediumCamera::ShutterOpenCloseTimes(), Isis::Mariner10Camera::ShutterOpenCloseTimes(), Isis::MdisCamera::ShutterOpenCloseTimes(), Isis::MexHrscSrcCamera::ShutterOpenCloseTimes(), Isis::MsiCamera::ShutterOpenCloseTimes(), Isis::NewHorizonsLorriCamera::ShutterOpenCloseTimes(), Isis::NewHorizonsMvicFrameCamera::ShutterOpenCloseTimes(), Isis::OsirisRexOcamsCamera::ShutterOpenCloseTimes(), Isis::RosettaOsirisCamera::ShutterOpenCloseTimes(), Isis::TgoCassisCamera::ShutterOpenCloseTimes(), Isis::VikingCamera::ShutterOpenCloseTimes(), Isis::VoyagerCamera::ShutterOpenCloseTimes(), Isis::FramingCamera::ShutterOpenCloseTimes(), Isis::Camera::StartEndEphemerisTimes(), Isis::AdvancedTrackTool::updateRow(), and Isis::UvvisCamera::UvvisCamera().
|
virtualinherited |
Returns the planetocentric latitude, in degrees, at the surface intersection point in the body fixed coordinate system.
Definition at line 210 of file Sensor.cpp.
References Isis::Angle::degrees(), and Isis::Sensor::GetLatitude().
Referenced by Isis::QnetTool::addMeasure(), Isis::CameraStatistics::addStats(), Isis::ProjectionFactory::CreateForCube(), Isis::ControlPointEditWidget::createTemporaryGroundMeasure(), Isis::ControlNetFilter::CubeDistanceFilter(), Isis::QnetCubeDistanceFilter::filter(), Isis::InterestOperator::FindCnetRef(), Isis::QnetTool::findPointLocation(), Isis::SmtkMatcher::getLatLon(), Isis::Camera::GroundRangeResolution(), Isis::PixelFOV::instantaneousFov(), Isis::Cube::latLonRange(), Isis::Chip::Load(), Isis::Camera::NorthAzimuth(), Isis::ControlNetFilter::PointDistanceFilter(), Isis::ControlNetFilter::PointLatLonFilter(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetRightAscensionDeclination(), Isis::ControlPointEditWidget::setShapesForPoint(), Isis::UniversalGroundMap::UniversalLatitude(), Isis::TrackTool::updateLabels(), and Isis::AdvancedTrackTool::updateRow().
|
virtualinherited |
Returns the positive east, 0-360 domain longitude, in degrees, at the surface intersection point in the body fixed coordinate system.
Definition at line 233 of file Sensor.cpp.
References Isis::Angle::degrees(), and Isis::Sensor::GetLongitude().
Referenced by Isis::QnetTool::addMeasure(), Isis::CameraStatistics::addStats(), Isis::ProjectionFactory::CreateForCube(), Isis::ControlPointEditWidget::createTemporaryGroundMeasure(), Isis::ControlNetFilter::CubeDistanceFilter(), Isis::QnetCubeDistanceFilter::filter(), Isis::InterestOperator::FindCnetRef(), Isis::QnetTool::findPointLocation(), Isis::SmtkMatcher::getLatLon(), Isis::Camera::GroundRangeResolution(), Isis::PixelFOV::instantaneousFov(), Isis::Cube::latLonRange(), Isis::Chip::Load(), Isis::Sensor::LocalSolarTime(), Isis::ControlNetFilter::PointDistanceFilter(), Isis::ControlNetFilter::PointLatLonFilter(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::ringRangeResolution(), Isis::ProjectionFactory::RingsCreateForCube(), Isis::Camera::SetRightAscensionDeclination(), Isis::ControlPointEditWidget::setShapesForPoint(), Isis::UniversalGroundMap::UniversalLongitude(), Isis::TrackTool::updateLabels(), and Isis::AdvancedTrackTool::updateRow().
|
privateinherited |
|
protectedinherited |
This contains the transformation matrix from J2000 (J) to Body fixed (B).
Recall that the transpose of this matrix JB will convert from body-fixed to J2000. It is left in protected space so that conversions between double and SpiceDouble do not have to occur in inheriting classes.
|
privateinherited |
|
privateinherited |
|
privateinherited |
|
privateinherited |
|
privateinherited |
Decliation (sky latitude)
Definition at line 250 of file Sensor.h.
Referenced by Isis::Sensor::computeRaDec(), and Isis::Sensor::Declination().
|
privateinherited |
|
privateinherited |
|
protectedinherited |
Ephemeris time (read NAIF documentation for a detailed description)
Definition at line 382 of file Spice.h.
Referenced by Isis::CSMCamera::SetGround(), and Isis::CSMCamera::SetImage().
|
privateinherited |
|
protectedinherited |
The InstrumentId as it appears on the cube.
Definition at line 494 of file Camera.h.
Referenced by Isis::Camera::Camera(), and Isis::Camera::instrumentId().
|
protectedinherited |
Full instrument name.
Definition at line 496 of file Camera.h.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Camera::Camera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::CSMCamera::init(), Isis::Camera::instrumentNameLong(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
protectedinherited |
Shortened instrument name.
Definition at line 497 of file Camera.h.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Camera::Camera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::CSMCamera::init(), Isis::Camera::instrumentNameShort(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
privateinherited |
|
privateinherited |
|
privateinherited |
|
protectedinherited |
Look direction in body fixed.
Definition at line 239 of file Sensor.h.
Referenced by Isis::Sensor::computeRaDec(), Isis::Sensor::lookDirectionBodyFixed(), Isis::CSMCamera::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::CSMCamera::SetImage(), Isis::Sensor::SetLookDirection(), and Isis::Sensor::SpacecraftSurfaceVector().
|
privateinherited |
|
protectedinherited |
flag to indicate we need to recompute ra/dec
Definition at line 240 of file Sensor.h.
Referenced by Isis::Sensor::computeRaDec(), Isis::Sensor::Declination(), Isis::Sensor::RightAscension(), Isis::Sensor::Sensor(), Isis::CSMCamera::SetGround(), Isis::Sensor::SetGroundLocal(), Isis::CSMCamera::SetImage(), and Isis::Sensor::SetLookDirection().
|
privateinherited |
Right ascension (sky longitude)
Definition at line 249 of file Sensor.h.
Referenced by Isis::Sensor::computeRaDec(), and Isis::Sensor::RightAscension().
|
privateinherited |
|
protectedinherited |
|
protectedinherited |
Full spacecraft name.
Definition at line 498 of file Camera.h.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Camera::Camera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::CSMCamera::init(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::Camera::spacecraftNameLong(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
protectedinherited |
Shortened spacecraft name.
Definition at line 499 of file Camera.h.
Referenced by Isis::ApolloMetricCamera::ApolloMetricCamera(), Isis::ApolloPanoramicCamera::ApolloPanoramicCamera(), Isis::Camera::Camera(), Isis::Chandrayaan1M3Camera::Chandrayaan1M3Camera(), Isis::ClipperNacRollingShutterCamera::ClipperNacRollingShutterCamera(), Isis::ClipperPushBroomCamera::ClipperPushBroomCamera(), Isis::ClipperWacFcCamera::ClipperWacFcCamera(), Isis::CrismCamera::CrismCamera(), Isis::CTXCamera::CTXCamera(), Isis::DawnFcCamera::DawnFcCamera(), Isis::DawnVirCamera::DawnVirCamera(), Isis::HayabusaAmicaCamera::HayabusaAmicaCamera(), Isis::HayabusaNirsCamera::HayabusaNirsCamera(), Isis::HiresCamera::HiresCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::HrscCamera::HrscCamera(), Isis::Hyb2OncCamera::Hyb2OncCamera(), Isis::CSMCamera::init(), Isis::IssNACamera::IssNACamera(), Isis::IssWACamera::IssWACamera(), Isis::JunoCamera::JunoCamera(), Isis::KaguyaMiCamera::KaguyaMiCamera(), Isis::KaguyaTcCamera::KaguyaTcCamera(), Isis::LoHighCamera::LoHighCamera(), Isis::LoMediumCamera::LoMediumCamera(), Isis::LroNarrowAngleCamera::LroNarrowAngleCamera(), Isis::LroWideAngleCamera::LroWideAngleCamera(), Isis::LwirCamera::LwirCamera(), Isis::MarciCamera::MarciCamera(), Isis::Mariner10Camera::Mariner10Camera(), Isis::MdisCamera::MdisCamera(), Isis::MexHrscSrcCamera::MexHrscSrcCamera(), Isis::MiniRF::MiniRF(), Isis::MocNarrowAngleCamera::MocNarrowAngleCamera(), Isis::MocWideAngleCamera::MocWideAngleCamera(), Isis::MsiCamera::MsiCamera(), Isis::NewHorizonsLeisaCamera::NewHorizonsLeisaCamera(), Isis::NewHorizonsLorriCamera::NewHorizonsLorriCamera(), Isis::NewHorizonsMvicFrameCamera::NewHorizonsMvicFrameCamera(), Isis::NewHorizonsMvicTdiCamera::NewHorizonsMvicTdiCamera(), NirCamera(), Isis::OsirisRexOcamsCamera::OsirisRexOcamsCamera(), Isis::RosettaOsirisCamera::RosettaOsirisCamera(), Isis::RosettaVirtisCamera::RosettaVirtisCamera(), Isis::Camera::spacecraftNameShort(), Isis::SsiCamera::SsiCamera(), Isis::TgoCassisCamera::TgoCassisCamera(), Isis::ThemisIrCamera::ThemisIrCamera(), Isis::ThemisVisCamera::ThemisVisCamera(), Isis::UvvisCamera::UvvisCamera(), Isis::VikingCamera::VikingCamera(), Isis::VimsCamera::VimsCamera(), and Isis::VoyagerCamera::VoyagerCamera().
|
privateinherited |
|
privateinherited |
|
privateinherited |
|
privateinherited |
|
privateinherited |
|
protectedinherited |
Target of the observation.
Definition at line 381 of file Spice.h.
Referenced by Isis::CSMCamera::setTarget().
|
protectedinherited |
This contains the sun position (u) in the bodyfixed reference frame (B).
It is left protected so that conversions between double and SpiceDouble do not have to occur in inheriting classes. Units are km
Definition at line 369 of file Spice.h.
Referenced by Isis::Sensor::IncidenceAngle(), Isis::Camera::LocalPhotometricAngles(), and Isis::Sensor::PhaseAngle().
|
privateinherited |
|
privateinherited |
|
protectedinherited |
A pointer to the AlphaCube.
Definition at line 503 of file Camera.h.
Referenced by Isis::Camera::CacheSize(), Isis::Camera::Camera(), Isis::Camera::LoadCache(), Isis::CSMCamera::parentLine(), Isis::Camera::ParentLines(), Isis::CSMCamera::parentSample(), Isis::Camera::ParentSamples(), Isis::Camera::RawFocalPlanetoImage(), Isis::CSMCamera::SetGround(), Isis::Camera::SetImage(), Isis::CSMCamera::SetImage(), Isis::Camera::SetRightAscensionDeclination(), Isis::Camera::StartEndEphemerisTimes(), and Isis::Camera::~Camera().
|
privateinherited |
The number of bands in the image.
Definition at line 537 of file Camera.h.
Referenced by Isis::Camera::Bands(), Isis::Camera::Camera(), Isis::Camera::GroundRangeResolution(), Isis::Camera::RaDecRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
Band value for child.
Definition at line 563 of file Camera.h.
Referenced by Isis::Camera::Band(), Isis::Camera::Camera(), Isis::Camera::exposureDuration(), and Isis::Camera::SetBand().
|
protectedinherited |
Line value for child.
Definition at line 502 of file Camera.h.
Referenced by Isis::Camera::exposureDuration(), Isis::Camera::Line(), Isis::Camera::RawFocalPlanetoImage(), Isis::CSMCamera::SetGround(), Isis::Camera::SetImage(), Isis::CSMCamera::SetImage(), Isis::Camera::SetImageMapProjection(), Isis::Camera::SetImageSkyMapProjection(), and Isis::Camera::SetRightAscensionDeclination().
|
protectedinherited |
Sample value for child.
Definition at line 501 of file Camera.h.
Referenced by Isis::Camera::exposureDuration(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::Sample(), Isis::CSMCamera::SetGround(), Isis::Camera::SetImage(), Isis::CSMCamera::SetImage(), Isis::Camera::SetImageMapProjection(), Isis::Camera::SetImageSkyMapProjection(), and Isis::Camera::SetRightAscensionDeclination().
|
privateinherited |
A pointer to the DetectorMap.
Definition at line 566 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::DetectorMap(), Isis::Camera::exposureDuration(), Isis::Camera::LineResolution(), Isis::Camera::ObliqueLineResolution(), Isis::Camera::ObliqueSampleResolution(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SampleResolution(), Isis::Camera::SetDetectorMap(), Isis::Camera::SetImage(), Isis::Camera::SetRightAscensionDeclination(), and Isis::Camera::~Camera().
|
privateinherited |
A pointer to the DistortionMap.
Definition at line 564 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::DistortionMap(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetDistortionMap(), Isis::Camera::SetImage(), Isis::Camera::SetRightAscensionDeclination(), and Isis::Camera::~Camera().
|
privateinherited |
The focal length, in units of millimeters.
Definition at line 518 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::DetectorResolution(), Isis::Camera::FocalLength(), and Isis::Camera::SetFocalLength().
|
privateinherited |
A pointer to the FocalPlaneMap.
Definition at line 565 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::FocalPlaneMap(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetFocalPlaneMap(), Isis::Camera::SetImage(), Isis::Camera::SetRightAscensionDeclination(), and Isis::Camera::~Camera().
|
privateinherited |
The ideal geometric tile size to end with when projecting.
Definition at line 573 of file Camera.h.
Referenced by Isis::Camera::GetGeometricTilingHint(), and Isis::Camera::SetGeometricTilingHint().
|
privateinherited |
The ideal geometric tile size to start with when projecting.
Definition at line 571 of file Camera.h.
Referenced by Isis::Camera::GetGeometricTilingHint(), and Isis::Camera::SetGeometricTilingHint().
|
privateinherited |
A pointer to the GroundMap.
Definition at line 567 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::GroundMap(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetGround(), Isis::Camera::SetGroundMap(), Isis::Camera::SetImage(), Isis::Camera::SetUniversalGround(), and Isis::Camera::~Camera().
|
privateinherited |
Flag showing if ground range was computed successfully.
Definition at line 532 of file Camera.h.
Referenced by Isis::Camera::Camera(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
Whether or no to ignore the Projection.
Definition at line 542 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::IgnoreProjection(), Isis::Camera::LoadCache(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetImage(), and Isis::Camera::SetRightAscensionDeclination().
|
privateinherited |
The number of lines in the image.
Definition at line 536 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::GroundRangeResolution(), Isis::Camera::Lines(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The maximum declination.
Definition at line 545 of file Camera.h.
Referenced by Isis::Camera::RaDecRange().
|
privateinherited |
The maximum latitude.
Definition at line 522 of file Camera.h.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::GroundRange(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
The maximum longitude.
Definition at line 524 of file Camera.h.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::GroundRange(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
The maximum longitude in the 180 domain.
Definition at line 530 of file Camera.h.
Referenced by Isis::Camera::GroundRange(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
The maximum oblique resolution.
Definition at line 528 of file Camera.h.
Referenced by Isis::Camera::GroundRangeResolution(), and Isis::Camera::HighestObliqueImageResolution().
|
privateinherited |
The maxumum right ascension.
Definition at line 547 of file Camera.h.
Referenced by Isis::Camera::RaDecRange().
|
privateinherited |
The maximum right ascension in the 180 domain.
Definition at line 549 of file Camera.h.
Referenced by Isis::Camera::RaDecRange().
|
privateinherited |
The maximum resolution.
Definition at line 526 of file Camera.h.
Referenced by Isis::Camera::GroundRangeResolution(), Isis::Camera::LowestImageResolution(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The maximum ring longitude (azimuth)
Definition at line 556 of file Camera.h.
Referenced by Isis::Camera::basicRingMapping(), Isis::Camera::ringRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The maximum ring longitude in the 180 domain.
Definition at line 558 of file Camera.h.
Referenced by Isis::Camera::ringRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The maximum ring radius.
Definition at line 554 of file Camera.h.
Referenced by Isis::Camera::basicRingMapping(), Isis::Camera::ringRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The minimum declination.
Definition at line 544 of file Camera.h.
Referenced by Isis::Camera::RaDecRange().
|
privateinherited |
The minimum latitude.
Definition at line 521 of file Camera.h.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::GroundRange(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
The minimum longitude.
Definition at line 523 of file Camera.h.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::GroundRange(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
The minimum longitude in the 180 domain.
Definition at line 529 of file Camera.h.
Referenced by Isis::Camera::GroundRange(), and Isis::Camera::GroundRangeResolution().
|
privateinherited |
The minimum oblique resolution.
Definition at line 527 of file Camera.h.
Referenced by Isis::Camera::GroundRangeResolution(), and Isis::Camera::LowestObliqueImageResolution().
|
privateinherited |
The minimum right ascension.
Definition at line 546 of file Camera.h.
Referenced by Isis::Camera::RaDecRange().
|
privateinherited |
The minimum right ascension in the 180 domain.
Definition at line 548 of file Camera.h.
Referenced by Isis::Camera::RaDecRange().
|
privateinherited |
The minimum resolution.
Definition at line 525 of file Camera.h.
Referenced by Isis::Camera::BasicMapping(), Isis::Camera::basicRingMapping(), Isis::Camera::GroundRangeResolution(), Isis::Camera::HighestImageResolution(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The minimum ring longitude (azimuth)
Definition at line 555 of file Camera.h.
Referenced by Isis::Camera::basicRingMapping(), Isis::Camera::ringRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The minimum ring longitude in the 180 domain.
Definition at line 557 of file Camera.h.
Referenced by Isis::Camera::ringRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The minimum ring radius.
Definition at line 553 of file Camera.h.
Referenced by Isis::Camera::basicRingMapping(), Isis::Camera::ringRange(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The pixel pitch, in millimeters per pixel.
Definition at line 519 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::DetectorResolution(), Isis::Camera::PixelPitch(), and Isis::Camera::SetPixelPitch().
|
protectedinherited |
Flag showing if Sample/Line has been computed.
Definition at line 505 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::ComputeAzimuth(), Isis::Camera::GetLocalNormal(), Isis::Camera::GroundRangeResolution(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::ringRangeResolution(), Isis::CSMCamera::SetGround(), Isis::Camera::SetImage(), Isis::CSMCamera::SetImage(), and Isis::Camera::SetRightAscensionDeclination().
|
privateinherited |
A pointer to the Projection.
Definition at line 541 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::HasProjection(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetImage(), Isis::Camera::SetImageMapProjection(), Isis::Camera::SetImageSkyMapProjection(), Isis::Camera::SetRightAscensionDeclination(), and Isis::Camera::~Camera().
|
privateinherited |
Flag showing if the raDec range has been computed successfully.
Definition at line 551 of file Camera.h.
Referenced by Isis::Camera::Camera(), and Isis::Camera::RaDecRange().
|
privateinherited |
The reference band.
Definition at line 539 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::HasReferenceBand(), and Isis::Camera::ReferenceBand().
|
privateinherited |
Flag showing if ring range was computed successfully.
Definition at line 560 of file Camera.h.
Referenced by Isis::Camera::Camera(), and Isis::Camera::ringRangeResolution().
|
privateinherited |
The number of samples in the image.
Definition at line 535 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::GroundRangeResolution(), Isis::Camera::RaDecRange(), Isis::Camera::RaDecResolution(), Isis::Camera::ringRangeResolution(), and Isis::Camera::Samples().
|
privateinherited |
A pointer to the SkyMap.
Definition at line 568 of file Camera.h.
Referenced by Isis::Camera::Camera(), Isis::Camera::SetRightAscensionDeclination(), Isis::Camera::SetSkyMap(), Isis::Camera::SkyMap(), and Isis::Camera::~Camera().